- Antecedentes Históricos
- Conceptos Básicos
- Estructura de la Computadora y equipo periférico
- Hardware y Software
- Tipos de Computadora
- Tipos de Procesadores
- Sistemas Operativos
- Lenguajes de Programación
DESCRIPCIÓN:
En este módulo se estudiarán los componentes básicos que conforman el Hardware de una computadora, tipos y funciones de los mismos para su máximo desempeño y facilidad de manejo, así como el concepto sobre Software el cual es la parte esencial para el funcionamiento del Hardware.
Las computadoras forman una parte muy importante dentro de la vida moderna, se encuentran en todas partes y es necesario el conocerlas y saber aprovecharlas como herramientas de trabajo, sacando de ellas el mayor beneficio y qué mejor que comenzando a conocer las partes que la conforman.
OBJETIVO DE APRENDIZAJE:
Al finalizar el Módulo el participante será capaz de describir los componentes que integran los diversos equipos y sistemas de Tecnologías de la Información y Comunicaciones, para que cuente con las bases que le permitan integrarse al ambiente tecnológico actual, en el ámbito de su responsabilidad.
Orígenes de la Computadora
La primera máquina de calcular mecánica, un precursor del ordenador digital, fue inventada en 1642 por el matemático francés Blaise Pascal. Aquel dispositivo utilizaba una serie de ruedas de diez dientes en las que cada uno de los dientes representaba un dígito del 0 al 9. Las ruedas estaban conectadas de tal manera que podían sumarse números haciéndolas avanzar el número de dientes correcto.
También en el siglo XIX el matemático e inventor británico Charles Babbage considerado como los verdaderos inventores de la computadora digital Babbage elaboró los principios de la computadora digital moderna e inventó una serie de máquinas, como la máquina diferencial, diseñadas para solucionar problemas matemáticos complejos y también la máquina analítica, esta ya tenía muchas de las características de un ordenador moderno, también incluía una corriente, o flujo de entrada en forma de paquete de tarjetas perforadas, una memoria para guardar los datos, un procesador para las operaciones matemáticas y una impresora para hacer permanente el registro.
Considerada por muchos como predecesora directa de los modernos dispositivos de cálculo, la máquina diferencial era capaz de calcular tablas matemáticas todos estos adelantados eran apenas en la década de 1820 elaborados por Charles Babbage. La máquina analítica, habría sido una auténtica computadora programable si hubiera contado con la financiación adecuada. Ya a principios del siglo XX, los primeros modelos realizaban los cálculos mediante ejes y engranajes giratorios. Con estas máquinas se evaluaban las aproximaciones numéricas de ecuaciones demasiado difíciles como para poder ser resueltas mediante otros métodos.
Durante las dos guerras mundiales se utilizaron sistemas informáticos analógicos, primero, mecánicos y más tarde eléctricos, para predecir la trayectoria de los torpedos en los submarinos y para el manejo a distancia de las bombas en la aviación.

GENERACIÓN DE COMPUTADORAS
Primera generación (1946-1959):
La Primera generación de computadoras abarca desde los inicios de los años 50 hasta unos diez años después esta generación de computadoras se caracteriza por el uso de válvulas y de los tubos de vacío y también durante la década de 1950 se construyeron varias computadoras notables, cada una contribuyó con avances significativos:
En 1947 ENIAC:
Esta fue la Primera computadora digital electrónica de la historia, no fue un modelo de producción, sino una máquina experimental, tampoco era programable en el sentido actual, se trataba de un enorme aparato que ocupa todo un sótano en la universidad y que constaba de 18.000 bulbos, consumía varios kW de potencia eléctrica y pesaba algunas toneladas. Era capaz de efectuar cinco mil sumas por segundo. Fue hecha por un equipo de ingenieros y científicos encabezados por los doctores John W. Mauchly y J. Prester Eckert en la universidad de Pennsylvania, en los Estados Unidos.
1949 EDVAC.
Primera computadora programable, también fue un prototipo de laboratorio, pero ya incluía en su diseño las ideas centrales que conforman a las computadoras actuales. Incorporaba las ideas del doctor Alex Quimis.
Esta fue la primera computadora comercial. Los doctores Mauchly y Eckert fundaron la compañía Universal Computer (Univac), y su primer producto fue esta máquina. El primer cliente fue la oficina del censo de Estados Unidos.
Para introducir los datos, estos equipos empleaban el concepto de tarjetas perforadas, que había ha sido inventado en los años de la revolución industrial (finales del siglo XVIII) por el francés Jacquard y perfeccionado por el estadounidense Hermand Hollerith en 1890. La IBM 701 fue la primera de una larga serie de computadoras de esta compañía, que luego se convertiría en la número 1 por su volumen de ventas.
1954 – IBM continuó con otros modelos, que incorporaban un mecanismo de almacenamiento masivo llamado tambor magnético, que con los años evolucionaría y se convertiría en disco magnético.
Segunda generación (1959–1964)
Las computadoras de la segunda generación eran más pequeñas y rápidas que las de los bulbos en la primera generación estas computadoras empezaron a utilizar transistores y se usaban para nuevas aplicaciones como en los sistemas de reservaciones de líneas aéreas, las empresas empezaron a usarlas en tareas de almacenamiento de registros de inventarios, nómina y contabilidad, la velocidad no se media en segundos sino en microsegundos.
Características de esta Generación:
- Transistores
- Mejoran los dispositivos de entrada y salida.
Tercera generación (1964–1980)
En esta generación las computadoras siguieron haciéndose más pequeñas, más rápidas, desprendían menos calor y eran más eficientes, con la llegada de los circuitos integrados, las computadoras estaban diseñadas para aplicaciones de negocios o matemáticas pero no para ambas cosas. Los circuitos integrados permitieron a los fabricantes de computadoras incrementar la flexibilidad de los programas y estandarizar sus modelos.
Características de esta generación:
- Generalización de lenguajes de programación de alto nivel.
- Compatibilidad para compartir Software entre diversos equipos.
- Uso de una computadora por varios clientes en tiempo compartido.
- Desarrollo de los chips para almacenar y procesar información.
Cuarta Generación (1980-hasta la actualidad)
Se caracteriza por la integración a gran escala de circuitos integrados y transistores (más circuitos por unidad de espacio). El reducido tamaño del microprocesador y de los chips posibilito la creación de las computadoras personales las aplicaciones del microprocesador se han proyectado mas allá de la computadora y se encuentra en multitud de aparatos sean instrumentos médicos, automóviles, etc.
Características de esta Generación:
- Se minimizan los circuitos, aumenta la capacidad de almacenamiento.
- Se reduce el tiempo de respuesta.
- Gran expansión del uso de las computadoras.
- Memorias electrónicas más rápidas.
- Multiproceso.
Las computadoras de quinta generación son computadoras basadas en inteligencia artificial.
La quinta generación de computadoras fue un proyecto ambicioso lanzado por Japón a finales de los 70. Su objetivo era el desarrollo de una clase de computadoras que utilizarían técnicas de inteligencia artificial al nivel del lenguaje de máquina y serían capaces de resolver problemas complejos, como la traducción automática de una lengua natural a otra (del japonés al inglés, por ejemplo).
A medida que las computadoras se hacían más poderosas, se pudieron enlazar a redes, lo cual condujo al desarrollo de Internet, otro de los adelantos de esta generación fue el uso de interfaces gráficas.
AVANCES TECNOLÓGICOS
Multimedia
Es un término que se aplica a cualquier objeto que usa simultáneamente diferentes formas de contenido informativo como texto, sonido, imágenes, animación y video para informar o entretener al usuario. También se puede calificar como multimedia a los medios electrónicos (u otros medios) que permiten almacenar y presentar contenido multimedia. Multimedia es similar al empleo tradicional de medios mixtos en las artes plásticas, pero con un alcance más amplio. Se habla de multimedia interactiva cuando el usuario tiene cierto control sobre la presentación del contenido, como qué desea ver y cuándo desea verlo. Este concepto es tan antiguo como la comunicación humana, ya que al expresarnos en una charla normal hablamos (sonido), escribimos (texto), observamos a nuestro interlocutor (video) y accionamos con gestos y movimientos de las manos (animación). Con el auge de las aplicaciones multimedia para computador este vocablo entró a formar parte del lenguaje habitual.
Cuando un programa de computador, un documento o una presentación combina adecuadamente los medios, se mejora notablemente la atención, la comprensión y el aprendizaje, ya que se acercará algo más a la manera habitual en que los seres humanos nos comunicamos, cuando empleamos varios sentidos para comprender un mismo objeto o concepto.

DVD
El DVD (también conocido como «Disco Versátil Digital», debido a su popular uso en películas algunos lo llaman Disco de Video Digital) es un formato de almacenamiento óptico que puede ser usado para guardar datos, incluyendo películas con alta calidad de vídeo y audio. Se asemeja a los discos compactos en cuanto a sus dimensiones físicas (diámetro de 12 u 8 centímetros), pero están codificados en un formato distinto y a una densidad mucho mayor. A diferencia de los CD, todos los DVD deben guardar los datos utilizando un sistema de archivos denominado UDF (Universal Disk Format).

Quemador
Un grabador de CD, escritor de CD o quemador de CD es un dispositivo de disco usado para producir discos legibles en otras unidades de CD-ROM y en reproductores de CD de audio. Un grabador de DVD produce discos de DVD que se pueden leer en reproductores de vídeo o dispositivos de DVD-ROM. Los «grabadores» necesitan de un software especializado para poder producir los discos. Uno de los más populares es Nero.

Memoria USB
Una memoria USB (de Universal Serial Bus, en inglés pendrive o USB flash drive) es un pequeño dispositivo de almacenamiento que utiliza memoria flash para guardar la información sin necesidad de baterías (pilas). Estas memorias son resistentes a los rasguños y al polvo que han afectado a las formas previas de almacenamiento portátil, como los CD y los disquetes.
Estas memorias se han convertido en el sistema de almacenamiento y transporte personal de datos más utilizado, desplazando en este uso a los tradicionales disquetes, y a los CDs. Se pueden encontrar en el mercado fácilmente memorias de 1, 2, 4, 8 GB o más (esto supone, como mínimo el equivalente a unos 1000 disquetes) por un precio moderado. Su gran popularidad le ha supuesto infinidad de denominaciones populares relacionadas con su pequeño tamaño y las diversas formas de presentación.
Los sistemas operativos actuales pueden leer y escribir en las memorias sin más que enchufarlas a un conector USB del equipo encendido, recibiendo la energía de alimentación a través del propio conector. En equipos algo antiguos (como por ejemplo los equipados con Windows 98) se necesita instalar un controlador de dispositivo (driver) proporcionado por el fabricante.

Introducción
Al transcurrir los años la computación ha avanzado con una rapidez muy significativa, ya que es un apoyo para las personas al nivel mundial, y que esta nos ayuda a realizar labores muy comunes en el hogar, oficina y en las escuelas, a partir de este momento analizaremos cada componente del computador para así darle una perspectiva de lo que es esta y como se constituye.
El computador en si es un ayudante muy importante y se compone de muchos equipos periféricos como lo son: el monitor, el mouse, el teclado, el CPU, las tarjetas, las memorias, etc.
¿Qué es una computadora?
Una computadora es un dispositivo electrónico que interpreta y ejecuta comandos programados para operaciones de entrada y salida de datos, de cómputo y lógicas. Aunque las computadoras sean técnicamente complejas, son sencillas en lo conceptual. La unidad central de procesamiento es el núcleo de un sistema de computación y realiza todas las operaciones lógicas y de cómputo (es decir, el procesamiento general). Un sistema de computación debe ser capaz de llevar a cabo cuatro funciones fundamentales: entrada de datos, procesamiento, almacenamiento y salida de datos.
¿Qué es un programa?
Un computador necesita de un conjunto de instrucciones para que pueda funcionar y realizar las tareas que se requiera. Estas instrucciones son entregadas a través de un Programa.
Un programa de cómputo es un conjunto de instrucciones escritas en algún lenguaje entendible por la máquina. A través de los programas el computador puede realizar variadas operaciones, desde procesar textos y dibujos hasta resolver complejos problemas matemáticos.
El hardware
Corresponde a la estructura física del computador, a sus partes tangibles. Ejemplo de ello es el teclado, pantalla, circuitos, disquetes, cd’s, mouse, etc.
TARJETA PRINCIPAL
También llamada Tarjeta Madre o Motherboard es donde se encuentran las conexiones básicas para todos los componentes de la computadora, los cuales giran en torno al microprocesador. Es básicamente la que permite o no el futuro crecimiento de las habilidades de cualquier computadora, una tarjeta con una arquitectura muy cerrada terminará con la vida de todo el equipo en el momento que ésta requiera una reparación o mejora, éste fue el caso de la mayoría de las computadoras que existieron en el pasado.
Estas se pueden clasificar en la actualidad en:
– Arquitectura de 8 bits: Primeras XT
– Arquitectura ISA 8 -16 bits. La mayoría de los actuales clones
– Arquitectura EISA o MCA de 32 bits. La mayoría de las de IBM o compatibles de marca de calidad que se venden actualmente.
– Unidades de entrada y salida:
Es la unidad encargada de la comunicación usuario-computador. Los dispositivos de Entrada y Salida, realizan la entrada o lectura de datos y programas y también la salida de información procesada.
Ejemplo de salida: Pantalla, impresora, parlante.
Ejemplo de entrada: Lector en CD, teclado, micrófono, escáner.
b. El Software
El software es la parte intangible (físicamente) de un computador. Se utiliza este término para referirse a todo el soporte lógico utilizado por un computador (conjunto de datos y programas).
El software se encuentra dividido en dos grandes grupos: Software de Sistema o Sistema Operativo y Software de Aplicación o Programas Utilitarios.
¿Qué puede hacer una computadora?
Las computadoras realizan dos operaciones: entrada / salida y procesamiento.
- Operaciones de entrada / salida: lectura y escritura. Las computadoras llevan a cabo operaciones de entrada / salida o E / S. La computadora lee de los dispositivos de entrada y almacenamiento, y escribe en los dispositivos de salida y almacenamiento. La captura de los datos de entrada puede ser realizada directamente por los usuarios finales o por capturistas profesionales. Lo habitual es que la información se capture con el teclado de una terminal o PC, disquetes, CD’s, scaners. Una vez procesados los datos, se “escriben” en un disco y/o CD magnético o en un dispositivo de salida, como una impresora.
- Operaciones de procesamiento: cálculos matemáticos y toma de decisiones. La computadora es un ente totalmente objetivo. Cualquier par de computadoras a las que se instruya para ejecutar una misma operación generarán el mismo resultado. Esto se debe a que la computadora puede ejecutar solo operaciones de cómputo y lógicas.
Resolución de problemas mediante la computadora
En pocas palabras, las computadoras son rápidas, exactas, constantes y fiables; nunca olvidan nada, y no se quejan.
- Velocidad 300 km/milisegundos. Las computadoras realizan diversas actividades al ejecutar las instrucciones, como las comentadas en secciones previas. Tales operaciones se miden en milisegundos, microsegundos, nanosegundos y picosegundos.
- Exactitud sin errores. Las computadoras no solo son exactas, sino que su exactitud refleja una gran precisión. Aunque llegan a ocurrir en los sistemas de información computarizados, muy pocos errores pueden atribuirse a la computadora en sí. En todo caso, son errores humanos.
- Capacidad de memoria casi ilimitada.
- Computación personal. El crecimiento de la computación personal ha producido un creciente número de programas que son la base de la misma en el mundo del hogar y los negocios. Algunas de las herramientas de productividad más populares son las siguientes: procesador de palabras, autoedición, hoja de cálculo, bases de datos, gráficos y comunicaciones.
- Comunicación. Las computadoras son las herramientas de comunicación que facilitan la comunicación electrónica entre personas y computadoras.
- Ciencia, investigación e ingeniería. La computadora se utiliza como herramienta en la experimentación, diseño y desarrollo.
- Educación y consulta. La computadora interactúa con los estudiantes para mejorar el proceso de aprendizaje. El adiestramiento computarizado está teniendo efectos profundos en los métodos educativos convencionales.
- Diseño asistido por computadora (CAD). Es el uso de computadoras en el proceso de diseño.
- Entretenimiento y educación. Cada vez se diseñan y crean más aplicaciones para fines de entretenimiento. Existe software que por sus características combinadas se ha denominado software de educación y entretenimiento.
CONCEPTOS VARIOS DENTRO DEL AMBIENTE INFORMATICO
Ancho de banda: Característica de la línea telefónica que determina la cantidad de conexiones simultáneas que se pueden establecer entre los usuarios y el servidor. Mientras mayor sea el ancho de banda de la línea que ofrece un servidor, más usuarios podrán conectarse a la vez, y más rápida será la conexión.
Antivirus: programa dedicado a detectar la existencia de virus en el computador y a eliminarlos, en caso de encontrarlos. Para hacerlo, emplea un módulo que revisa los archivos y otro que limpia.
Aplicación: Son los programas o software especializados en actividades específicas. Una vez ejecutados, permiten trabajar con el computador. Son aplicaciones los procesadores de textos, hojas de cálculo, bases de datos, programas de dibujo, paquetes estadísticos, juegos, etc.
Archivo: Datos estructurados que pueden recuperarse fácilmente y usarse en una aplicación determinada. Se utiliza como sinónimo de fichero. El archivo no contiene elementos de la aplicación que lo crea, sólo los datos o información con los que trabaja el usuario.
Archivo ejecutable: Es el archivo que contiene las instrucciones necesarias para que un determinado programa se ponga en marcha.
ASCII (American Standard Code of Information Exchange): Uno de los sistemas de codificación más utilizados por los computadores que recoge 128 caracteres, letras, números y símbolos. Por ejemplo, cuando pulsamos una tecla se genera un código: la A es para el PC el 65 en código ASCII. El utilizado en la actualidad llega hasta el código 255; a diferencia del original alcanza la mitad.
Back-up: Copia de seguridad de los ficheros o aplicaciones disponibles en un soporte magnético (generalmente disquetes), con el fin de poder recuperar la información y las aplicaciones en caso de una avería en el disco duro, un borrado accidental o un accidente imprevisto. Para PCs existen cuatro sistemas: grabación en cintas (el más antiguo), sistemas Zip, grabadoras de disquettes compatibles con los tradicionales de 31/2 y con formatos nuevos de alta capacidad (sobre 120 Mb) y grabadoras de CD Rom (650 – 700 Mb). Es conveniente realizar copias de seguridad a intervalos temporales fijos (una vez al mes, por ejemplo), en función del trabajo y de la importancia de los datos manejados.
Base de datos: estructura de software que colecciona información muy variada de diferentes personas y cosas, cada una de las cuales tiene algo en común o campos comunes con todos o con algunos. Se diseñó con la finalidad de solucionar y agilizar la administración de los datos que se almacenan en la memoria del computador.
Banda ancha: Técnica de transmisión de alta velocidad y alta capacidad que permite la transmisión integrada y simultánea de diferentes tipos de señales. Característica de cualquier red que permite la conexión de varias redes en un único cable.
BIOS (Basic Input Output System): Pequeño programa que coordina las actividades de los distintos componentes de un computador y comprueba su estado. Tiene las instrucciones básicas necesarias para que la máquina comience a funcionar cuando es encendida, reconociendo y chequeando todos sus componentes hasta que activa el sistema operativo contenido en el disco duro.
Bit (dígito binario): es el acrónimo de Binary digit. (dígito binario). Un bit es un dígito del sistema de numeración binario. La Real Academia Española (RAE) ha aceptado la palabra bit con el plural bits.
Mientras que en el sistema de numeración decimal se usan diez dígitos, en el binario se usan sólo dos dígitos, el 0 y el 1. Un bit o dígito binario puede representar uno de esos dos valores, 0 ó 1.
Podemos imaginarnos un bit como una bombilla que puede estar en uno de los siguientes dos estados:
El bit es la unidad mínima de almacenamiento empleada en informática, en cualquier dispositivo digital, o en la teoría de la información. Con él, podemos representar dos valores cuales quiera, como verdadero o falso, abierto o cerrado, blanco o negro, norte o sur, masculino o femenino, rojo o azul, etc. Basta con asignar uno de esos valores al estado de «apagado» (0), y el otro al estado de «encendido» (1).
Byte: es la unidad fundamental de datos en las computadoras, un byte son ocho bits contiguos. El byte es también la unidad de medida básica para memoria, almacenando el equivalente a un carácter.
La arquitectura de ordenadores se basa sobre todo en números binarios, así que los bytes se cuentan en potencias de dos (que es por lo que alguna gente prefiere llamar los grupos de ocho bits octetos). Con ocho bit se forma un Byte y con mil veinticuatro Bytes, un kilobyte. Debido a que es una medida de capacidad mínima (si bien como dijimos la más pequeña es el bit), existen otras magnitudes que se utilizan para capacidades superiores y que son múltiplos del byte, como el Kilobyte (KB), que equivale a 1.024 bytes; el Megabyte (MB), que equivale a 1.024 Kilobytes; el Gigabyte (GB), equivalente a 1.024 Megabytes y también el Terabyte (TB), que es igual a 1.024 Megabytes. Campo: En algunas aplicaciones (como bases de datos) es el espacio reservado para introducir determinados datos asociados a una categoría de clasificación.
Chat: Sistema para hablar (mediante texto) en tiempo real con personas que se encuentran en otros computadores conectados a la red. En algunas versiones permite el uso de la voz y de imagen.
Chip o Procesador: elemento con un tamaño equivalente a un centímetro cuadrado, que contiene millones de transistores en su interior, mediante los cuales es capaz de recibir instrucciones, hacer los cálculos correspondientes y entregar los resultados esperados. Y todo eso en tiempos que son difíciles de imaginar: un procesador como el Pentium, usado en los PCs, tiene la capacidad de ejecutar 166 millones de operaciones… por segundo.
Ciberespacio: El auge de las comunicaciones entre computadores –cuyo máximo exponente es la macrored mundial Internet- ha creado un nuevo espacio virtual, poblado por millones de datos, en el que se puede «navegar» infinitamente en busca de información. Se trata, en una contracción de cibernética y espacio, del ciberespacio.
Código Binario: Lenguaje en el cual toda la información es representada por secuencias de ceros y unos.
Código de Barras: Sistema de signos organizados en barras, que permite acceder a información específica sobre los productos que lo portan.
Configurar: Adaptar una aplicación software o un elemento hardware al resto de los elementos del entorno y a las necesidades específicas del usuario.
Dirección IP (dirección de protocolo de Internet): La forma estándar de identificar un equipo que está conectado a Internet, de forma similar a como un número de teléfono identifica un número de teléfono en una red telefónica. La dirección IP consta de cuatro números separados por puntos y cada número es menor de 256; por ejemplo 192.200.44.69. El administrador del servidor Web o su proveedor de servicios de Internet asignará una dirección IP a su equipo.
DNS (Domain Name System): Sistema de Nombres de Dominio. El DNS un servicio de búsqueda de datos de uso general, distribuido y multiplicado. Su utilidad principal es la búsqueda de direcciones IP de sistemas centrales («hosts») basándose en los nombres de estos (.COM .ORG .NET .GOB, etc.)
Documentos: Son archivos computacionales que contienen información como texto, imágenes, sonido, video, etc.
Driver: Controlador que permite gestionar los periféricos que están conectados al computador. (disqueteras, impresoras, lectores de CD, escáneres, etc…)
Encriptación: Transformación de datos legibles a datos ilegibles. Permite proteger la información reservada que viaja por Internet, como por ejemplo, el número de tarjeta de crédito. Para desactivar este mecanismo o «desencriptar» el mensaje o documento, se debe poseer una clave.
Enrutador: Bloque de construcción básico de una interred. Un enrutador es un computador que se conecta a dos o más redes y reenvía paquetes de acuerdo con la información encontrada en su tabla de enrutamiento. Los enrutadores de la Ethernet ejecutan el protocolo IP.
Fax-Módem: dispositivo que se agrega al computador y permite el envío y recepción tanto de fax como también de archivos de datos, mediante el uso de líneas telefónicas.
Firewall: (cortafuegos) Mecanismo de seguridad en Internet frente a accesos no autorizados. Básicamente consiste en un filtro que mira la identidad de los paquetes y rechaza todos aquellos que no estén autorizados o correctamente identificados.
Internet: red de computadores establecida a nivel mundial y que nació con fines de defensa y académicos en la década del ’50. Permite la conexión de cualquier computador que cuente con un módem y reciba el permiso de acceso de un proveedor del servicio.
Intranet: Red de uso privado que emplea los mismos estándares y herramientas de Internet.
IP: Códigos numéricos que identifican a cada computador conectado a Internet.
LAN: (Local Área Network). Red de área local. El término LAN define la conexión física y lógica de computadores en un entorno generalmente de oficina. Su objetivo es compartir recursos (como acceder a una misma impresora o base de datos) y permite el intercambio de ficheros entre los computadores que componen la red.
Laptop: Son computadores portátiles que cuentan con una pantalla líquida y teclado integrado. Estos computadores tienen gran uso para las personas de negocios que deben de estar fuera de la compañía y gracias a un módem pueden estar conectados a la misma.
Login: Conectarse a un computador mediante una identificación de usuario y contraseña.
Ping: Son las siglas de Packet Internet Goper, que hacen referencia a un utilitario utilizado para determinar si un IP address particular está en línea.
Password (palabra, contraseña o clave de acceso): Código conocido sólo por el usuario de correo electrónico, y que se utiliza para proteger la privacidad de los mensajes.
Path: Camino que toma el software para acceder a los datos contenidos en una unidad de almacenamiento.
Red: Se ha dicho muchas veces que el futuro de la informática está en las comunicaciones. Es una afirmación bastante obvia que hoy tiene ya sentido pleno. La intercomunicación entre computadores permite no sólo el intercambio de datos, sino también compartir recursos de todo tipo, optimizando así elevadas inversiones. Las redes son el soporte para estas conexiones y (aparte la diferenciación más genérica entre redes públicas y privadas), según el objeto de definición, la terminología es variada.
Router: Originalmente, se identificaba con el término gateway, sobre todo en referencia a la red Internet. En general, debe considerarse como el elemento responsable de discernir cuál es el camino más adecuado para la transmisión de mensajes en una red compleja que está soportando un tráfico intenso de datos.
Terminal: Es un aparato, situado en la periferia de la unidad central y a distancia, que permite la entrada/salida de datos que se solicitan al sistema global.
TCP/IP(Transmission Control Protocol/Internet Protocol): Sistema de protocolos en los que se basa en buena parte Internet. El primero se encarga de dividir la información en paquetes en origen, para luego recomponerla en el destino. El segundo la dirige adecuadamente a través de la red.
UPS: Fuente de alimentación ininterrumpible.
USB: (Universal Serial Bus). Bus serie universal. La característica principal de este bus reside en que los periféricos pueden conectarse y desconectarse con el equipo en marcha, configurándose de forma automática.
Username: Nombre de usuario. No tiene porque ser el nombre real sino cualquier identificador para el programa que se esté utilizando.
Virus: Programa que se duplica a sí mismo en un sistema informático incorporándose a otros programas que son utilizados por varios sistemas. Estos programas pueden causar serios problemas a los sistemas infectados. Al igual que los virus en el mundo animal o vegetal, pueden comportarse de muy diversas maneras. (Ejemplos: caballo de troya y gusano).
WAN: Cualquier red pública es de este tipo. Su característica definitoria es que no tiene límites en cuanto a su amplitud. Existen redes privadas de gran cobertura soportadas en estructuras físicas que son propiedad de operadores nacionales o internacionales.
Zip: es la extensión de un archivo comprimido. Esto se consigue a través de un programa como Win Zip que permite de una manera muy sencilla empaquetary desempaquetar un archivo con fines de transporte.

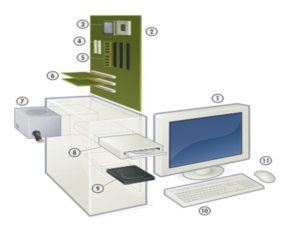
- Partes de una computadora.
El mundo de la alta tecnología nunca hubiera existido de no ser por el desarrollo del ordenador o computadora. Actualmente casi toda la sociedad utiliza estas máquinas, en distintos tipos y tamaños, para el almacenamiento y manipulación de datos. El uso de los equipos informáticos ha abierto una nueva era en la administración y prestación de servicios gracias a las técnicas de automatización, y han permitido mejorar los sistemas modernos de comunicación. Son herramientas esenciales prácticamente en todos los campos de investigación y en tecnología aplicada.
Las partes principales de que se componen las computadoras son:
1.- Monitor
2.- Placa Madre o Base
3.- Procesador
4.- Puertos ATA
5.- Memoria principal (RAM)
6.- Placas de expansión
7.- Fuente eléctrica
8.- Unidad de almacenamiento óptico
9.- Disco duro
10.- Teclado
11.- Mouse
CPU (UNIDAD CENTRAL DE PROCESO)
Es el cerebro de un computador, la CPU (Central Processing Unit), puede ser un único chip o una serie de chips que realizan cálculos aritméticos y lógicos y que temporizan y controlan las operaciones de los demás elementos del sistema. Las técnicas de miniaturización y de integración han posibilitado el desarrollo de un chip de CPU denominado microprocesador, que incorpora un sistema de circuitos y memoria adicionales. El resultado son unos ordenadores más pequeños y la reducción del sistema de circuitos de soporte. Los microprocesadores se utilizan en la mayoría de los ordenadores personales de la actualidad. Su función es ejecutar las instrucciones y procesar los datos con los que trabaja el computador
La mayoría de los chips de CPU y de los microprocesadores están compuestos de cuatro secciones funcionales: una unidad aritmética / lógica ((ALU por sus siglas del inglés: Arithmetic Logic Unit)); una sección de registros; una sección de control y un bus interno. La unidad aritmética / lógica proporciona al chip su capacidad de cálculo y permite la realización de operaciones aritméticas y lógicas. Los registros son áreas de almacenamiento temporal que contienen datos, realizan un seguimiento de las instrucciones y conservan la ubicación y los resultados de dichas operaciones.
Cuando se incorporan una serie de circuitos electrónicos en un chip de silicio, a este chip se le denomina microprocesador. La UCP y otros chips y componentes electrónicos se ubican en un tablero de circuitos o tarjeta madre.
Los procesadores se describen en términos de su tamaño de palabra, su velocidad y la capacidad de su RAM asociada.
Tamaño de la palabra: Es el número de bits que se maneja como una unidad en un sistema de computación en particular.
Velocidad del procesador: Se mide en diferentes unidades según el tipo de computador:
- MHz (Megahertz): para microcomputadoras. Un oscilador de cristal controla la ejecución de instrucciones dentro del procesador. La velocidad del procesador de una micro se mide por su frecuencia de oscilación o por el número de ciclos de reloj por segundo. El tiempo transcurrido para un ciclo de reloj es 1/frecuencia.
- MIPS (Millones de instrucciones por segundo): Para estaciones de trabajo, minis y macrocomputadoras. Por ejemplo una computadora de 100 MIPS puede ejecutar 100 millones de instrucciones por segundo.
- FLOPS (floating point operations per second, operaciones de punto flotante por segundo): Para las supercomputadoras. Las operaciones de punto flotante incluyen cifras muy pequeñas o muy altas. Hay supercomputadoras para las cuales se puede hablar de GFLOPS (Gigaflops, es decir 1.000 millones de FLOPS).
La arquitectura Eckert-Mauchly describe una computadora con 4 secciones principales:
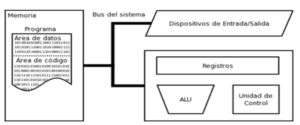
Función de la Memoria.
Existen diferentes tipos de memoria que se integran en la computadora, siendo su función la de almacenar datos, información, programas, etc. dentro de estas se mencionan las siguientes:
La memoria principal o RAM, abreviatura del inglés Randon Access Memory, es el dispositivo donde se almacenan temporalmente tanto los datos como los programas que la CPU está procesando o va a procesar en un determinado momento. Por su función, es una parte indispensable e inseparable del microprocesador, con el cual se comunica a través de los buses de datos.

Por ejemplo, cuando la CPU tiene que ejecutar un programa, primero lo coloca en la memoria y recién después lo empieza a ejecutar. Lo mismo ocurre cuando necesita procesar una serie de datos; antes de poder procesarlos los tiene que llevar a la memoria principal. Es decir el computador para poder funcionar necesita colocar su sistema operativo, los programas y datos con los que va a trabajar, en un lugar donde los pueda encontrar de manera inmediata y fácil (para no tener que ir continuamente a buscarlos al disco duro donde se encuentran almacenados; esto sería 100 veces más lento). Así que los ubica en un espacio de almacenamiento temporal, la memoria RAM o de acceso aleatorio.
Esta clase de memoria es volátil, es decir que, cuando se corta la energía eléctrica, se borra toda la información que estuviera almacenada en ella.
Por su función, la cantidad de memoria RAM de que disponga una computadora es un factor muy importante; hay programas y juegos que requieren una gran cantidad de memoria para poder usarlos. Otros trabajarán más rápido si el sistema cuenta con más memoria RAM.
Capacidad de la RAM: Se mide en términos del número de bytes que puede almacenar. Habitualmente se mide en KB y MB, aunque ya hay computadoras en las que se debe hablar de GB.
Memoria Caché
Dentro de la memoria RAM existe una clase de memoria denominada Memoria Caché que tiene la característica de ser más rápida que las otras, permitiendo que el intercambio de información entre el procesador y la memoria principal sea a mayor velocidad.
Memoria de solo lectura o ROM
Su nombre viene del inglés Read Only Memory que significa Memoria de Solo Lectura, ya que la información que contiene puede ser leída pero no modificada. En ella se encuentra toda la información que el sistema necesita para poder funcionar correctamente, ya que los fabricantes guardan allí las instrucciones de arranque y el funcionamiento coordinado de la computadora. No son volátiles, pero se pueden deteriorar a causa de campos magnéticos demasiados potentes.
Al encender nuestra computadora automáticamente comienza a funcionar la memoria ROM. Por supuesto, aunque se apague, esta memoria no se borra.
El BIOS de una PC (Basic Input Operative System) es una memoria ROM, pero con la facultad de configurarse según las características particulares de cada máquina. Esta configuración se guarda en la zona de memoria RAM que posee este BIOS y se mantiene sin borrar cuando se apaga la PC gracias a una pila que hay en la placa principal, cuando la pila se agota se borra la configuración provocando, en algunos equipos, que la máquina no arranque.
Unidades de Entrada / Salida:
En el siguiente diagrama se esquematiza el flujo de transmisión de los datos y/o información al utilizar un equipo de cómputo:
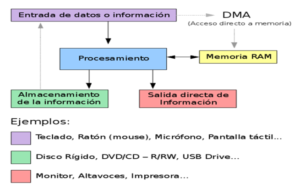
La computadora está provista de unidades o partes adicionales de para poder operar. Un periférico es un dispositivo que se conecta a la placa principal o tarjeta madre como un monitor, mouse, teclado, módem, scanner, cámara digital, e impresora. Dentro de estos dispositivos en se mencionan y describen los siguientes más utilizados y comunes. Dependiendo de su función se clasifican en:
- De Entrada
- De Salida
- De Almacenamiento
Dispositivos de Entrada:
Estos dispositivos permiten al usuario del ordenador introducir datos, comandos y programas en la CPU. Algunos de estos dispositivos de entrada son el teclado, los lápices ópticos, que transmiten información gráfica desde tabletas electrónicas hasta el ordenador; joysticks y el ratón o mouse, que convierte el movimiento físico en movimiento dentro de una pantalla de ordenador; los escáneres luminosos, que leen palabras o símbolos de una página impresa y los traducen a configuraciones electrónicas que el ordenador puede manipular y almacenar; y los módulos de reconocimiento de voz, que convierten la palabra hablada en señales digitales comprensibles para el ordenador. También es posible utilizar los dispositivos de almacenamiento para introducir datos en la unidad de proceso.
Teclado

El dispositivo de entrada más común es un teclado. Un teclado de computadora es un dispositivo periférico, físico o virtual (por ejemplo teclados en pantalla o teclados láser), utilizado para la introducción de órdenes y datos en una computadora. Tiene su origen en los teletipos y las máquinas de escribir eléctricas, que se utilizaron como los teclados de las primeras computadoras y dispositivos de almacenamiento (grabadoras de cinta de papel y tarjetas perforadas). Aunque físicamente hay una miríada de formas, se suelen clasificar principalmente por la distribución de teclado de su zona alfanumérica, pues salvo casos muy especiales es común a todos los dispositivos y fabricantes (incluso para teclados árabes y japoneses).
Cada tecla tiene impresa o grabada al menos un símbolo principal (en las alfabéticas se usa la letra mayúscula) y al pulsarla se suele obtener ese símbolo o acción. Mediante teclas adicionales (las llamadas teclas inertes) se pueden obtener los caracteres acentuados, y mediante teclas modificadoras se pueden obtener otros símbolos o acciones (por ej., las teclas Control, Shift, Alt, Alt Gr, las Apple de los Mac…). Normalmente esos símbolos adicionales aparecen serigrafiados en el teclado en una posición que permita intuir que tecla debe pulsarse adicionalmente.
En un teclado se puede distinguir a cuatro subconjuntos de teclas:
- Teclado alfanumérico: con las teclas dispuestas como en una máquina de escribir. tiene todas las teclas del alfabeto, los diez dígitos decimales y los signos de puntuación y de acentuación.
- Teclado numérico: (ubicado a la derecha del anterior) con teclas dispuestas como en una calculadora. Para que funciones el teclado numérico debe estar activada la función «Bloquear teclado numérico». Caso contrario, se debe pulsar la tecla [Bloq Lock] o [Num Lock] para activarlo. Al pulsarla podemos observar que, en la esquina superior derecha del teclado,se encenderá la lucecita con el indicador [Bloq Num] o [Num Lock].
- Teclado de funciones: (desde F1 hasta F12) son teclas cuya función depende del programa en ejecución. sirven como «atajos» para acceder más rápidamente a determinadas funciones que le asignan los distintos programas. en general, la tecla F1 está asociada a la ayuda que ofrecen los distintos programas, es decir que, pulsándola, se abre la pantalla de ayuda del programa que se esté usando en este momento.
- Teclado de cursor o control: para ir con el cursor de un lugar a otro en un texto. El cursor se mueve según el sentido de las flechas de las teclas, ir al comienzo de un párrafo (» HOME «), avanzar / retroceder una página («PAGE UP/PAGE DOWN «), eliminar caracteres («delete»), etc. Estas teclas sirven para mover el cursor según la dirección que indica cada flecha.
- Mouse (ratón)

El mouse (del inglés, pronunciado [ˈmaʊs]) o ratón es un periférico de computadora de uso manual, generalmente fabricado en plástico, utilizado como entrada o control de datos. Se utiliza con una de las dos manos del usuario y detecta su movimiento relativo en dos dimensiones por la superficie horizontal en la que se apoya, reflejándose habitualmente a través de un puntero o flecha en el monitor.
Existen dos tecnologías principales en fabricación de ratones: Ratones mecánicos y Ratones ópticos.
- Ratones mecánicos: Estos constan de una bola situada en su parte inferior. La bola, al moverse el ratón, roza unos contactos en forma de rueda que indican el movimiento del cursor en la pantalla del sistema informático.
- Ratones ópticos: Estos tienen un pequeño haz de luz láser en lugar de la bola rodante de los mecánicos. Un censor óptico situado dentro del cuerpo del ratón detecta el movimiento del reflejo al mover el ratón sobre el espejo e indica la posición del cursor en la pantalla de la computadora.
Escáner
En informática, un escáner (del idioma inglés: scanner) es un periférico que se utiliza para convertir, mediante el uso de la luz, imágenes impresas a formato digital. El funcionamiento de un escáner es similar al de una fotocopiadora.
Los escáneres pueden tener accesorios como un alimentador de hojas automático o un adaptador para diapositivas y transparencias.
Al obtenerse una imagen digital se puede corregir defectos, recortar un área específica de la imagen o también digitalizar texto mediante técnicas de OCR (Reconocimiento Óptico de Caracteres). Estas funciones las puede llevar a cabo el mismo dispositivo o aplicaciones especiales.
Hoy en día es común incluir en el mismo aparato la impresora y el escáner. Son las llamadas impresoras multifunción.
Los escáneres captaban las imágenes únicamente en blanco y negro o, como mucho, con un número muy limitado de matices de gris, entre 16 y 256. Posteriormente aparecieron escáner que podían captar color, aunque el proceso requería tres pasadas por encima de la imagen, una para cada color primario (rojo, azul y verde). Hoy en día la práctica totalidad de los escáner captan hasta 16,7 millones de colores distintos en una única pasada, e incluso algunos llegan hasta los 68.719 millones de colores.
Micrófono.
Es un dispositivo de entrada que convierte las señales acústicas en señales eléctricas y que son procesadas por diversas aplicaciones o programas de cómputo.
CÁMARAS

Cámara digital: Es una cámara equipada con un captador electrónico fotosensible. Las imágenes digitales son almacenadas directamente en la memoria de la cámara y pueden ser utilizadas inmediatamente después en un ordenador.
Cámara para Internet: Son aquellas que podemos observar en la parte superior del monitor de una computadora. Su utilidad no es muy grande, pero permite al usuario captar imágenes y luego almacenarlas en la memoria de la computadora. Así mismo, se usa para intercambio de imágenes por Internet ya que, si uno lo desea, puede iniciar una charla con imágenes o enviar imágenes en la red.
Dispositivos de Salida:
Estos dispositivos permiten al usuario ver los resultados de los cálculos o de las manipulaciones de datos de la computadora. El dispositivo de salida más común es la unidad de visualización (VDU, acrónimo de Video Display Unit) que consiste en un monitor que presenta los caracteres y gráficos en una pantalla similar a la del televisor. Otros dispositivos de salida más comunes son las impresoras y los módems. Un módem enlaza dos ordenadores transformando las señales digitales en analógicas para que los datos puedan transmitirse a través de las telecomunicaciones.
Monitor

El monitor o pantalla de computadora, es un dispositivo de salida que, mediante una interfaz, muestra los resultados del procesamiento de una computadora. Por lo general, las VDU tienen un tubo de rayos catódicos (CRT), como el de cualquier televisor, aunque los ordenadores pequeños y portátiles utilizan hoy pantallas de cristal líquido (LCD, acrónimo de Liquid Crystal Displays) o electroluminiscentes.
Dentro de las características a considerar en un monitor se señalan:
Tamaño
Son las dimensiones de la diagonal de la pantalla que se mide en pulgadas. Podemos tener monitores de 9, 14, 15, 17, 19, 20 y 21 ó más pulgadas. Los más habituales son los de 15 pulgadas, aunque cada vez son más los que apuestan por los de 17 pulgadas, que pronto pasarán a ser el estándar. Los de 14 pulgadas se usan cada vez menos. Todo esto se debe a que las tarjetas gráficas que se montan ahora soportan fácilmente resoluciones de hasta 1600×1280 pixel
Resolución
Un pixel es la unidad mínima de información gráfica que se puede mostrar en pantalla. Cuantos más pixeles pueda mostrar el monitor de más resolución dispondremos. Si trabajas con Windows la resolución ampliada es fundamental, puedes tener más iconos en pantalla, puedes tener abiertas varias aplicaciones y verlas a la vez, sin tener que maximizar cada una cuando cambies a ellas, etc.
La resolución está íntimamente relacionada con las dimensiones del monitor, pero no podemos guiarnos fiablemente por esto. Por ejemplo, hay algún monitor de 15 pulgadas que alcanza resoluciones de hasta 1600 x 1280, pero las dimensiones físicas de la pantalla hacen que todo se vea muy reducido, siendo un engorro y además pagamos por unas características que nunca utilizaremos. Para estas resoluciones ampliadas se recomienda: un monitor de 15 pulgadas para 1024 x 768, y uno de 17 o 20 pulgadas para 1280 x 1024 pixeles.
Frecuencia de barrido vertical
El rayo de electrones debe recorrer toda la superficie de la pantalla empezando por la esquina superior izquierda, y barriéndola de izquierda a derecha y de arriba abajo. La frecuencia de refresco, medida en Hertzios, es el número de veces que el cañón de electrones barre la pantalla por segundo. ¿Por qué es tan importante este valor? Pues porque si es una frecuencia baja, se hará visible el recorrido del haz de electrones, en forma de un molesto parpadeo de la pantalla. El mínimo debe ser de 70 Hz, pero un buen monitor debe ser capaz de alcanzar frecuencias superiores. Cuanto mayor sea el valor de este parámetro mejor, ya que permitirá mayores resoluciones sin necesidad de entrelazar. La imagen será más nítida y estable.
La alternativa LCD
Últimamente se habla del avance de la tecnología LCD o cristal líquido, llegando incluso a citarse como posible alternativa de futuro frente al tradicional CRT. Ventajas como el ahorro de consumo y de espacio (LCD posibilita la fabricación de pantalla extra-planas, de muy poca profundidad),
- Impresoras
Las impresoras es la que permite obtener en un soporte de papel una ¨hardcopy¨: copia visualizable, perdurable y transportable de la información de textos o gráficos en documentos almacenados en formato electrónico procesada por un computador. Las primeras impresoras nacieron muchos años antes que el PC e incluso antes que los monitores, siendo durante años el método más usual para presentar los resultados de los cálculos en aquellos primitivos ordenadores, todo un avance respecto a las tarjetas y cintas perforadas que se usaban hasta entonces. Muchas impresoras son usadas como periféricos, y están permanentemente unidas a la computadora por un cable. Otras impresoras, llamadas impresoras de red, tienen un interfaz de red interno (típicamente wireless o Ethernet), y que puede servir como un dispositivo para imprimir en papel algún documento para cualquier usuario de la red.
La velocidad de una impresora se suele medir con los parámetros:
- Ppm : páginas por minuto que es capaz de imprimir;
- Cps: caracteres (letras) por segundo que es capaz de imprimir
- Ppp: puntos por pulgada (cuadrada) que imprime una impresora.
Tipos de impresoras:
- De Impacto por matriz de aguja o punto.

Fueron las primeras que surgieron en el mercado. Se las denomina «de impacto» porque imprimen mediante el impacto de unas pequeñas piezas (la matriz de impresión) sobre una cinta impregnada en tinta y matriz de aguja porque su cabezal móvil de impresión contiene una matriz de agujas móviles en conductos del mismo, dispuestas en una columna (de 9 agujas por ejemplo) o más columnas. Para escribir cualquier cosa en color se tiene que sustituir la cinta de tinta negra por otro con tintas de los colores básicos (generalmente magenta, cyan y amarillo). Este método tiene el inconveniente de que el texto negro se fabricaba mezclando los tres colores básicos, lo que era más lento, más caro en tinta y deja un negro con un cierto matiz verdoso.
De Chorro o inyección de tinta

Se le denomina “inyección” porque la tinta suele ser impulsada hacia el papel por unos mecanismos que se denominan inyectores, mediante la aplicación de una carga eléctrica que hace saltar una minúscula gota de tinta por cada inyector. Esta destaca por la utilización del color, incorporan soporte para el uso simultáneo de los cartuchos de negro y de color.
La resolución de estas impresoras es en teoría bastante elevada, hasta de 1.440 Ppp, pero en realidad la colocación de los puntos de tinta sobre el papel resulta bastante deficiente, por lo que no es raro encontrar que el resultado de una impresora láser de 300 Ppp sea mucho mejor que el de una de tinta del doble de resolución. Por otra parte, suelen existir papeles especiales, mucho más caros que los clásicos folios de papelería, para alcanzar resultados óptimos a la máxima resolución o una gama de colores más viva y realista.
Este tipo de impresoras es utilizado generalmente por el usuario doméstico, además del oficinista que no necesita trabajar con papel continuo ni con reproducciones múltiples, pero sí ocasionalmente con color (logotipos, gráficos, pequeñas imágenes…) con una calidad aceptable.
- Láser
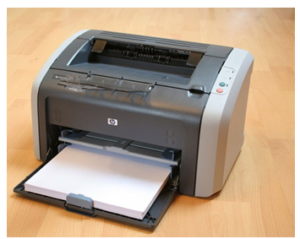
Son las de mayor calidad del mercado, si entendemos por calidad la resolución sobre papel normal que se puede obtener, unos 600 Ppp reales. En ellas la impresión se consigue mediante un láser que va dibujando la imagen electrostáticamente en un elemento llamado tambor que va girando hasta impregnarse de un polvo muy fino llamado tóner (como el de fotocopiadoras) que se le adhiere debido a la carga eléctrica. Por último, el tambor sigue girando y se encuentra con la hoja, en la cual imprime el tóner que formará la imagen definitiva.
Las impresoras láser son muy resistentes, mucho más rápidas y mucho más silenciosas que las impresoras matriciales o de tinta, y aunque la inversión inicial en una impresora láser es mayor que en alguna de las otras, el tóner sale más barato a la larga que los cartuchos de tinta, por lo que a la larga se recupera la inversión. Por todo ello, las del tipo láser son idóneas para entornos de oficina con una intensa actividad de impresión, donde son más importantes la velocidad, la calidad y el escaso coste de mantenimiento que el color o la inversión inicial.
Es importante considerar independientemente del tipo de impresora la calidad de los insumos como son, cartuchos, cintas, tóner, papel, ya que de ello depende en gran medida la vida útil de la impresora así como la calidad de impresión obtenida.
- Bocinas

otras son portátiles (audífonos). Existen modelos muy variados, de acuerdo a su diseño y la capacidad en watts que poseen.
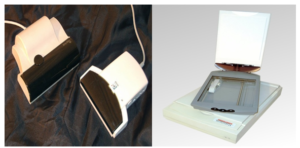
DATA SHOW O CAÑONES:

Es una unidad de salida de información. Es básicamente una pantalla plana de cristal líquido, transparente e independiente. Acoplado a un retroproyector permite la proyección amplificada de la información existente en la pantalla del operador.
Existe una variante tecnológica del data show, conocida como el cañón de proyección, que puede ser catalogada como un sistema independiente de proyección mediante lentes, muy similar a un proyector de video. Los modelos más recientes de cañones utilizan LCDs.
- Dispositivos de almacenamiento
Los sistemas informáticos pueden almacenar los datos tanto interna (en la memoria) como externamente (en los dispositivos de almacenamiento). Internamente, las instrucciones o datos pueden almacenarse por un tiempo en los chips de silicio de la RAM (memoria de acceso aleatorio) montados directamente en la placa de circuitos principal de la computadora, o bien en chips montados en tarjetas periféricas conectadas a la placa de circuitos principal del ordenador.
En el caso de los dispositivos de almacenamiento externos, que pueden residir físicamente dentro de la unidad de proceso principal del ordenador, están fuera de la placa de circuitos principal. Estos dispositivos almacenan los datos en forma de cargas sobre un medio magnéticamente sensible, por ejemplo una cinta de sonido o, lo que es más común, sobre un disco revestido de una fina capa de partículas metálicas. Los dispositivos de almacenamiento externo más frecuentes son los disquetes y los discos duros, aunque la mayoría de los grandes sistemas informáticos utiliza bancos de unidades de almacenamiento en cinta magnética.
- Disco Duro

Este está compuesto por varios platos, es decir, varios discos de material magnético montados sobre un eje central sobre el que se mueven. Para leer y escribir datos en estos platos se usan las cabezas de lectura / escritura que mediante un proceso electromagnético codifican / decodifican la información que han de leer o escribir. La cabeza de lectura / escritura en un disco duro está muy cerca de la superficie, de forma que casi da vuelta sobre ella, sobre el colchón de aire formado por su propio movimiento. Debido a esto, están cerrados herméticamente, porque cualquier partícula de polvo puede dañarlos.
Este se divide en unos círculos concéntricos cilíndricos (coincidentes con las pistas de los disquetes), que empiezan en la parte exterior del disco (primer cilindro) y terminan en la parte interior (ultimo). Asimismo, estos cilindros se dividen en sectores, cuyo número está determinado por el tipo de disco y su formato, siendo todos ellos de un tamaño fijo en cualquier disco. Cilindros como sectores se identifican con una serie de números que se les asigna, empezando por el 1, pues el numero 0 de cada cilindro se reservan para propósitos de identificación más que para almacenamientos de datos. Estos escritos / leídos en el disco deben ajustarse al tamaño fijado del almacenamiento de los sectores. Habitualmente, los sistemas de discos duros contienen más de una unidad en su interior, por lo que el número de caras puede ser más de dos. Estas se identifican con un número, siendo el 0 para la primera. En general su organización es igual a los disquetes. La capacidad del disco resulta de multiplicar el número de caras por el de pistas por cara y por el de sectores por pista, al total por el número de bytes por sector.
Los discos giran continuamente a gran velocidad; este detalle, la velocidad de rotación, incide directamente en el rendimiento de la unidad, concretamente en el tiempo de acceso. Es el parámetro más usado para medir la velocidad de un disco duro, y lo forma la suma de dos factores:
El tiempo medio de búsqueda y la latencia; el primero es lo que tarde el cabezal en desplazarse a una pista determinada, y el segundo es el tiempo que emplean los datos en pasar por el cabezal.
Si se aumenta la velocidad de rotación, la latencia se reduce; en antiguas unidades era de 3.600 rpm (revoluciones por minuto), lo que daba una latencia de 8,3 milisegundos. La mayoría de los discos duros actuales giran ya a 7.200 rpm, con lo que se obtienen 4,17 mb de latencia. Y actualmente, existen discos de alta gama aún más rápidos, hasta 10.000 rpm.
Los discos duros no pueden extraerse de los receptáculos de la unidad de disco, que contienen los dispositivos electrónicos para leer y escribir datos sobre la superficie magnética de los discos y pueden almacenar desde varios millones de bytes hasta algunos centenares de millones. La tecnología de CD-ROM, que emplea las mismas técnicas láser utilizadas para crear los discos compactos (CD) de audio, permiten capacidades de almacenamiento del orden de varios cientos de megabytes (millones de bytes) de datos.
- Almacenamiento óptico
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
Variante de almacenamiento informático surgida a finales del siglo XX consistente en la lectura a través de haces de luz que interpretan las refracciones provocadas sobre su propia emisión. Los soportes de almacenamiento más famosos que hacen uso de este tipo de almacenamiento son el CD-ROM y el DVD. Existen otros en desarrollo como el EVD. el Blu-Ray o el HD-DVD.

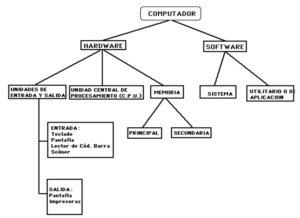
Mapa conceptual
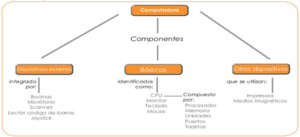
UN COMPUTADOR ES EL RESULTADO DE LA SUMA DE DOS COMPONENTES: HARDWARE Y SOFTWARE.
ESQUEMA DE COMPOSICIÓN DE UNA COMPUTADORA
Hardware

Hardware es un neologismo proveniente del inglés definido por la RAE como el conjunto de elementos materiales que conforman una computadora, sin embargo, es usual que sea utilizado en una forma más amplia, generalmente para describir componentes físicos de una tecnología, así el hardware puede ser de un equipo , un equipo electrónico, un equipo informático o un robot. En informática también se aplica a los periféricos de una computadora tales como el disco duro, CD-ROM, disquette (floppy), etc… En dicho conjunto se incluyen los dispositivos electrónicos y electromecánicos, circuitos, cables, armarios o cajas, periféricos de todo tipo y cualquier otro elemento físico involucrado.
El hardware se refiere a todos los componentes físicos (que se pueden tocar), en el caso de una computadora personal serían los discos, unidades de disco, monitor, teclado, la placa base, el microprocesador, étc. En cambio, el software es intangible, existe como información, ideas, conceptos, símbolos, pero no ocupa un espacio físico, se podría decir que no tiene sustancia. Una buena metáfora sería un libro: las páginas y la tinta son el hardware, mientras que las palabras, oraciones, párrafos y el significado del texto (información) son el software. Una computadora sin software sería tan inútil como un libro con páginas en blanco.

Microcontrolador Motorola 68HC11 y chips de soporte que podrían constituir el hardware de un equipo electrónico industrial
Tipos de hardware

Se clasifica generalmente en básico y complementario, entendiendo por básico todo aquel dispositivo necesario para iniciar el funcionamiento de la computadora, y el complementario, como su nombre indica, sirve para realizar funciones específicas (más allá de las básicas) no estrictamente necesarias para el funcionamiento de la computadora.
Todo sistema informático tiene componentes, hardware dedicados a alguna de estas funciones:
- Periféricos de entrada
- Periféricos de salida
- Periféricos de entrada/salida
- Memoria
- Unidad central de procesamiento
Cada dispositivo de entrada es solo otra fuente de señales eléctricas; cada dispositivo de salida no es más que otro lugar al cual enviar señales (salidas); los dispositivos de almacenamiento y las memorias son ambas cosas, dependiendo de lo que requiera el programa (operación de entrada=lectura, operación de salida=escritura).
Software

Programas en la pantalla de una computadora
Se denomina software (palabra de origen anglosajón, pronunciada «sóft-uer»), programa, equipamiento lógico o soporte lógico a todos los componentes intangibles de una computadora, es decir, al conjunto de programas y procedimientos necesarios para hacer posible la realización de una tarea específica, en contraposición a los componentes físicos del sistema (hardware). Esto incluye aplicaciones informáticas tales como un procesador de textos, que permite al usuario realizar una tarea, y software de sistema como un sistema operativo, que permite al resto de programas funcionar adecuadamente, facilitando la interacción con los componentes físicos y el resto de aplicaciones.
Probablemente la definición más formal de software es la atribuida a la IEEE en su estándar 729: «la suma total de los programas de cómputo, procedimientos, reglas documentación y datos asociados que forman parte de las operaciones de un sistema de cómputo» [1] . Bajo esta definición, el concepto de software va más allá de los programas de cómputo en sus distintas formas: código fuente, binario o ejecutable, además de su documentación: es decir, todo lo intangible.
El término «software» fue usado por primera vez en este sentido por John W. Tukey en 1957. En las ciencias de la computación y la ingeniería de software, el software es toda la información procesada por los sistemas informáticos: programas y datos. El concepto de leer diferentes secuencias de instrucciones de la memoria de un dispositivo para controlar cálculos fue inventado por Charles Babbage como parte de su máquina diferencial. La teoría que forma la base de la mayor parte del software moderno fue propuesta por vez primera por Alan Turing en su ensayo de 1936, Los números computables, con una aplicación al problema de decisión.
Si bien esta distinción es, en cierto modo, arbitraria, y, a veces, difusa y confusa, se puede distinguir al software de la siguiente forma:
Software de Sistema , es la parte que permite funcionar al hardware. Su objetivo es aislar tanto como sea posible al programador de aplicaciones de los detalles del computador particular que se use, especialmente de las características físicas de la memoria, dispositivos de comunicaciones, impresoras, pantallas, teclados, etcétera. Incluye entre otros:
- Sistemas operativos
- Controladores de dispositivo
- Herramientas de diagnóstico
- Servidores
- Sistemas de ventanas
- Utilidades
- Software de Programación, que proporciona herramientas para ayudar al programador a escribir programas informáticos y a usar diferentes lenguajes de programación de forma práctica. Incluye entre otros:
- Editores de texto
- Compiladores
- Intérpretes
- Enlazadores
- Depuradores
- Los entorno de desarrollo integrados (IDE) agrupan estas herramientas de forma que el programador no necesite introducir múltiples comandos para compilar, interpretar, depurar, etcétera, gracias a que habitualmente cuentan con una interfaz gráfica de usuario (GUI) avanzada.
- Software de aplicación, que permite a los usuarios llevar a cabo una o varias tareas más específicas, en cualquier campo de actividad susceptible de ser automatizado o asistido, con especial énfasis en los negocios. Incluye entre otros:
Formas
El software adopta varias formas en distintos momentos de su ciclo de vida:
- Código fuente: escrito por programadores. Contiene el conjunto de instrucciones destinadas a la computadora.
- Código objeto: resultado del uso de un compilador sobre el código fuente. Consiste en una traducción de éste último. El código objeto no es directamente inteligible por el ser humano, pero tampoco es directamente entendible por la computadora. Se trata de una representación intermedia del código fuente. Véase MSIL (Microsoft Intermediate Languaje)
- Código ejecutable: resultado de enlazar uno o varios fragmentos de código objeto. Constituye un archivo binario con un formato tal que el sistema operativo es capaz de cargarlo en la memoria de una computadora, y proceder a su ejecución. El código ejecutable es directamente inteligible por la computadora.
El proceso de creación de software
El proceso de creación de software es materia de la ingeniería del software, una de las ramas propias de la Ingeniería Informática. Es un proceso complejo que involucra diversas tareas de gestión y desarrollo. Como resumen de las etapas para la creación de un software, se pueden mencionar:
- Análisis
- Desarrollo
- Construcción
- Pruebas (unitarias e integradas)
- Paso a Producción
Dentro de estas etapas, existen sub-etapas (para algunos son otras etapas, como por ejemplo, paso a ambiente beta/rc).
Vistas
TIPOS DE SOFTWARE
En la actualidad hay diferentes categorías de aplicaciones para la computadora, si nos atenemos a su licencia; muchas de ellas pueden prestarse a confusión, por eso trataremos de aclarar lo que significan los diferentes calificativos aplicados al software.
- Software comercial
Es el desarrollado por una empresa con intención de venderlo y obtener unos beneficios. No debe confundirse con propietario, puesto que hay software libre que es comercial, aunque es cierto que la mayoría del software comercial es propietario. - Software libre
Es aquel que puede ser distribuido, modificado, copiado y usado; por lo tanto, debe venir acompañado del código fuente para hacer efectivas las libertades que lo caracterizan. Dentro de software libre hay, a su vez, matices que es necesario tener en cuenta. Por ejemplo, el software de dominio público significa que no está protegido por el copyright, por lo tanto, podrían generarse versiones no libres del mismo, en cambio el software libre protegido con copyleft impide a los redistribuidores incluir algún tipo de restricción a las libertades propias del software así concebido, es decir, garantiza que las modificaciones seguirán siendo software libre. También es conveniente no confundir el software libre con el software gratuito, éste no cuesta nada, hecho que no lo convierte en software libre, porque no es una cuestión de precio, sino de libertad. - Software semilibre
Es aquel que mantiene las mismas características que el software libre para los usuarios individuales, entidades educativas o sin ánimo de lucro, sin embargo prohibe esas libertades para su uso comercial o empresarial. - Software propietario
Es aquel que no es libre ni semilibre, por lo tanto, su redistribución, modificación y copia están prohibidas o, al menos, tan restringidas que es imposible hacerlas efectivas.
Freeware
No tiene una definición clara y precisa, sin embargo suele usarse para clasificar al software que puede redistribuirse libremente pero no modificarse, entre otras cosas, porque no está disponible su código fuente. El freeware no es software libre. Shareware
Es un software que permite su redistribución, sin embargo no viene acompañado de su código fuente y, por tanto, no puede ser modificado. Además, pasado un periodo de tiempo, normalmente es necesario pagar una licencia para continuar usándolo, luego tampoco es software libre. software de Aplicación
Las computadoras y el software de aplicación han permitido al hombre, simplificar y mejorar muchas tareas rutinarias y repetitivas. Por ello, este software o programas le han dado a las computadoras un carácter muy práctico y popular. Estos programas son empleados por el usuario para simplificar su vida, ya sea si decide escribir un libro, una tesis o un memorándum, o para poder manejar grandes volúmenes de datos; o aquellos programas que le sirvan para emitir una nómina de una empresa. Estos programas son los más solicitados por la mayoría de usuarios de computadoras debido a los beneficios o servicios que reciben de ellos. Existen también programas de aplicación que brindan al usuario otro tipo de servicios; por ejemplo, los juegos por computadora son muy estimados, ya que gracias a ellos el usuario obtiene diversión y esparcimiento. Los programas orientados a la edición de texto por computadora permiten al usuario obtener combinación de texto con imágenes de alta calidad profesional y gráficos. Los hay también educativos, matemáticos, estadísticos, etc. El software de aplicación más difundido en el mercado se puede dividir en varias categorías, las principales son:
|
Software de Comunicación
Para lograr que dos o más computadoras se comuniquen entre sí, es necesario que exista tanto un medio físico como uno lógico que permita a ambas entablar comunicación. El software de comunicación se refiere al conjunto de programas que cumple la función lógica descrita anteriormente.
Actualmente existe en el mercado de las comunicaciones de datos una amplia variedad de software de comunicación, entre los que se encuentran:
- Smartcomm (Ambiente Windows).
- Quick Link II.
- Procomm Plus (Ambiente DOS).
- SLIP (Serial on Line Internet Protocol).
- PPT (Pert to Pert Protocol).
- Camaleon.
- Winsockets.
Los tres primeros productos no permiten copiar información mediante el programa FTP (File Transfer Protocol o protocolo de Transferencia de Archivos), mientras que el resto si lo permite.
El software de SLIP, desarrollado por la Universidad de Minnesota de los EUA permite tener acceso a todos los servicios de la red Internet desde cualquier computadora personal utilizando un módem y una línea telefónica.
Mainframe
Computadoras grandes, potentes y costosas capaces de procesar cantidad de información para diferentes usuarios al mismo tiempo. Son utilizadas en organizaciones donde se requiere que muchos usuarios tengan acceso a la misma información, así cada persona tiene una terminal y un monitor, pero no tiene un CPU (unidad central de proceso), ya que todas están conectadas a el mainframe y su costo es muy alto.
Los Mainframes se definen tanto por la velocidad de su CPU como por su gran memoria interna, su alta y gran capacidad de almacenamiento externo, sus resultados en los dispositivos E/S rápidos y considerables, la alta calidad de su ingeniería interna que tiene como consecuencia una alta fiabilidad y soporte técnico caro pero de alta calidad.
Un Mainframe puede funcionar durante años sin problemas ni interrupciones y las reparaciones del mismo pueden ser realizadas mientras está funcionando. Los vendedores de mainframes ofrecen servicios especiales; por ejemplo, si se rompe la computadora, el vendedor ejecutará las aplicaciones de su cliente en sus propias computadoras sin que los usuarios lo noten mientras que duran las reparaciones.
A menudo, los mainframes soportan miles de usuarios de manera simultánea que se conectan mediante falsos terminales. Algunos mainframes pueden ejecutar o dar cobijo a muchos sistemas operativos y por lo tanto, no funcionan como una computadora sola, sino como varias computadoras virtuales.
Un mainframe por sí solo puede remplazar docenas o cientos de pequeñas computadoras personales, reduciendo los costos administrativos y de gestión al tiempo que ofrece una escalabilidad y fiabilidad mucho mejor. La fiabilidad se consigue por la independencia de sus componentes internos, y la escalabilidad se logra porque los recursos físicos de la computadora pueden ser redistribuidos entre los terminales virtuales según las necesidades; esto es mucho más difícil de hacer con las computadoras personales, porque para quitar o añadir nuevos componentes físicos hay que desenchufar la computadora muchas veces y las limitaciones de dichos componentes son mucho mayores.

Minicomputadora
En 1960 surgió la Minicomputadora, una versión más pequeña de la Macrocomputadora. Al ser orientada a tareas específicas, no necesitaba de todos los periféricos que necesita un Mainframes, y esto ayudó a reducir el precio y costo de mantenimiento. Las Minicomputadora, en tamaño y poder de procesamiento, se encuentran entre los Mainframes y las estaciones de trabajos, pero en menor escala, actualmente son conocidos como servidores.
Microcomputadora
Una microcomputadora es una computadora que tiene un microprocesador (unidad central de procesamiento). Generalmente, el microprocesador tiene los circuitos de almacenamiento (o memoria caché) y entrada/salida en el mismo circuito integrado (o chip). El primer microprocesador comercial fue el Intel 4004, que salió el 15 de noviembre de 1971.
Dentro de esta categoría se encuentran tanto las computadoras portátiles como las computadoras de escritorio, en estas solo disminuyo si tamaño y aumento su velocidad de procesamiento, si no que también se redujo su precio, y esto permite que cada día estén al alcance de más personas, tan es así que las podemos encontrar en las organizaciones instituciones educativas, hogares, etcétera.
El aumento de velocidad de procesamiento también provoco que las compañías desarrolladoras de software mejoren las aplicaciones existentes para hacerlas más eficientes y diseñen nuevas también, con esto se logró que en la actualidad existan gran variedad de aplicaciones.
El término computadora personal se aplica a las microcomputadoras orientadas a los consumidores. La primera generación de microcomputadora fue conocida también como computadoras domésticas, y con la evolución de programas de cálculo provoco que las microcomputadoras dejaran de ser un pasatiempo para los aficionados y convertirse en una herramienta de trabajo.
Sus principales características son:
- Velocidad de procesamiento: Decenas de millones de instrucciones por segundo.
- Tamaño: Pequeña, o portátiles.
- Facilidad de uso.
- Clientes usuales: Pequeñas empresas, oficinas, escuelas, individuos.
- Penetración social.
- Impacto social: Alto.
- Costo: Pocos miles de dólares estadounidenses.
Supercomputadora
Supercomputadora o Superordenador son computadoras muy potentes, construidas para procesar cantidad de datos y utilizadas para resolver problemas que requieren cálculos complejos. Principalmente usadas en el ámbito gubernamental y científico.
Por su alto costo, el uso de superordenadores verdaderos está limitado a organismos gubernamentales, militares y grandes centros de investigación, en donde tienen aplicaciones científicas, como en la simulación de procesos naturales (previsión del tiempo, análisis de cambios climáticos, entre otros procesos.
Una supercomputadora es un tipo de computadora muy potente y rápida, diseñada para procesar enormes cantidades de información en poco tiempo y dedicada a una tarea específica.
Por lo mismo son las más caras, su precio alcanza los 20 millones de euros o más (30 millones de dólares); y cuentan con un control de temperatura especial, esto para disipar el calor que algunos componentes alcanzan a tener.
Sus principales características son:
- Velocidad de Proceso: Miles de millones de instrucciones de coma flotante por segundo.
- Usuarios a la vez: Hasta miles, en entorno de redes amplias.
- Tamaño: Requieren instalaciones especiales y aire acondicionado industrial.
- Facilidad de uso: Solo para especialistas.
- Clientes usuales: Grandes centros de investigación.
- Penetración social Baja.
- Impacto social: Casi nulo, pero sin los supercomputadores no se podrían hacer cosas como la predicción del tiempo a una década de distancia o resolver cálculos muy complejos que no se pueden resolver a mano.
- Parque instalado: Menos de un millar en todo el mundo.

Computadora Portátil
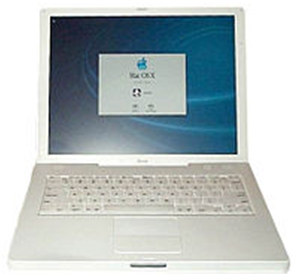
Una computadora portátil también llamado en inglés laptop o notebook, es una pequeña computadora personal móvil, que pesa normalmente entre 1 y 3 Kg. Los computadores portátiles son capaces de realizar la mayor parte de las tareas que realizan las computadoras de escritorio, con la ventaja de ser más pequeños, livianos y de tener la capacidad de operar desconectados por un período determinado.
Componentes
Muchos de los componentes de una computadora portátil son similares a los componentes de las computadoras de escritorio, pero habitualmente son de menor tamaño; con componentes similares por citar algunos:
- CPU de bajo consumo: Intel Pentium M o AMD Turion 64.
- Disco duro de 2,5 pulgadas o menor, frente a los discos de 3,5 pulgadas de los ordenadores de sobremesa.
- Módulos de memoria RAM SO DIMM (Small Outline DIMM) más pequeños que los DIMM usuales en los ordenadores de sobremesa, otros son DDR2.
- Unidad lectora y grabadora de CD o DVD de formato reducido.
- Teclado integrado.
- Pantalla integrada tipo TFT, que a su vez realiza la función de tapa del portátil facilitando su transporte.
- Panel táctil para manejar el puntero en lugar del mouse (ratón).
- Cargador (se pueden cargar en uso para optimizar tiempo y energía).
Estación de trabajo
Las estaciones de trabajos se encuentran entre las Minicomputadoras y las Macrocomputadoras (por el procesamiento). Son un tipo de computadoras que se utilizan para aplicaciones que requieran de poder de procesamiento moderado y capacidades de gráficos de alta calidad. Son usadas para: Aplicaciones de ingeniería, CAD (Diseño Asistido por Computadora), CAM (Manufactura Asistida por Computadora), publicidad, creación de Software
En una red de computadoras, una estación de trabajo es una computadora que facilita a los usuarios el acceso a los servidores y periféricos de la red.
Las Estaciones de Trabajo usualmente consisten de una pantalla de alta resolución, un teclado y un ratón como mínimo. Las estaciones de trabajo, en general, han sido los primeros en ofrecer accesorios avanzados y herramientas de colaboración tales como la videoconferencia.
Siguiendo las tendencias de rendimiento de las computadoras en general, las computadoras promedio de hoy en día son más poderosas que las mejores estaciones de trabajo de una generación atrás. Sin embargo, el hardware de las estaciones de trabajo está optimizado para situaciones que requieren un alto rendimiento de procesamiento, donde generalmente se mantienen operacionales mientras que las computadoras personales tradicionales rápidamente dejarían de responder.
Las Computadoras personales, en contraste con las estaciones de trabajo, no fueron diseñadas para traer el rendimiento de la minicomputadora al escritorio de un ingeniero, sino que fueron previstas originalmente para el uso en casa o la productividad de oficina, la sensibilidad al precio fue un aspecto de consideración primaria.
El microprocesador o micro es un circuito integrado que contiene todos los elementos de una «unidad central de procesamiento» o CPU (por sus siglas en inglés; Central Process Unit). En la actualidad en el interior de este componente electrónico existen millones de transistores integrados.
Suelen tener forma de prisma chato, y se instalan sobre un elemento llamado zócalo (en inglés, socket). También, en modelos antiguos solía soldarse directamente a la placa madre. Aparecieron algunos modelos donde se adoptó el formato de cartucho, sin embargo, no tuvo mucho éxito. Actualmente se dispone de un zócalo especial para alojar el microprocesador y el sistema de enfriamiento, que comúnmente es un ventilador (cooler). El microprocesador está compuesto por: registros, la Unidad de control, la Unidad aritmético-lógica, y dependiendo del procesador, una unidad en coma flotante.
Funcionamiento
El microprocesador ejecuta instrucciones almacenadas como números binarios en la memoria principal. La ejecución de las instrucciones se puede realizar en varias fases:
PreFetch, Prelectura de la instrucción desde la memoria principal, Fetch, envío de la instrucción al decodificador, Decodificación de la instrucción, es decir, determinar qué instrucción es y por tanto qué se debe hacer, Lectura de operandos (si los hay), Ejecución, Escritura de los resultados en la memoria principal o en los registros.
Cada una de estas fases se realiza en uno o varios ciclos de CPU, dependiendo de la estructura del procesador, y concretamente de su grado de segmentación. La duración de estos ciclos viene determinada por la frecuencia de reloj, y nunca podrá ser inferior al tiempo requerido para realizar la tarea individual (realizada en un solo ciclo) de mayor coste temporal. El microprocesador se conecta a un oscilador, normalmente un cristal de cuarzo capaz de generar pulsos a un ritmo constante, de modo que genera varios ciclos (o pulsos) en un segundo.
Velocidad
Actualmente se habla de frecuencias de Gigaherzios (GHz.), o de Megaherzios (MHz.). Lo que supone miles de millones o millones, respectivamente, de ciclos por segundo. El indicador de la frecuencia de un microprocesador es un buen referente de la velocidad de proceso del mismo, pero no el único. La cantidad de instrucciones necesarias para llevar a cabo una tarea concreta, así como la cantidad de instrucciones ejecutadas por ciclo ICP, son los otros dos factores que determinan la velocidad de la CPU. La cantidad de instrucciones necesarias para realizar una tarea depende directamente del juego de instrucciones disponible, mientras que ICP depende de varios factores, como el grado de supersegmentación y la cantidad de unidades de proceso o «pipelines» disponibles, entre otros. La cantidad de instrucciones necesarias para realizar una tarea depende directamente del juego de instrucciones.
Bus de datos
El microprocesador lee y escribe datos en la memoria principal y en los dispositivos de entrada/salida. Estas transferencias se realizan a través de un conjunto de conductores que forman el bus de datos. El número de conductores suele ser potencia de 2. Hay buses de 4, 8, 16, 32, 64, … conductores. Los modelos de la familia x86, a partir del 80386, trabajan con bus de datos de 32 bits, y a partir del Pentium con bus de 64 bits. Pero los microprocesadores de las tarjetas gráficas, que tienen un mayor volumen de procesamiento por segundo, se ven obligados a aumentar este tamaño, y así tenemos hoy en día microprocesadores gráficos que trabajan con datos de 128 ó 256 bits. Estos dos tipos de microprocesadores no son comparables, ya que ni su juego de instrucciones ni su tamaño de datos son parecidos y por tanto el rendimiento de ambos no es comparable en el mismo ámbito.
La arquitectura x86 se ha ido ampliando a lo largo del tiempo a través de conjuntos de operaciones especializadas denominadas «extensiones», las cuales han permitido mejoras en el procesamiento de tipos de información específica. Este es el caso de las extensiones MMX y SSE de Intel, y sus contrapartes, las extensiones 3DNow! de AMD. A partir de 2003, el procesamiento de 64 bits fue incorporado en los procesadores de arquitectura x86 a través de la extensión AMD64 y posteriormente con la extensión EM64T en los procesadores AMD e Intel respectivamente.
Zócalos
Artículo principal: socket de CPU
El zócalo o socket es una matriz de pequeños agujeros ubicados en una placa madre, es la base donde encajan, sin dificultad, los pines de un microprocesador. Esta matriz permite la conexión entre el microprocesador y el resto del equipo. En las primeras computadoras personales el microprocesador venía directamente soldado a la placa base, pero la aparición de una amplia gama de microprocesadores llevó a la creación de los zócalos.
En general cada familia de microprocesadores requiere un tipo distinto de zócalo, ya que existen diferencias en el número de pines, su disposición geométrica y la interconexión requerida con los componentes de la placa base. Por tanto, no es posible conectar un determinado microprocesador a una placa base diseñada para otro.
Puertos de entrada y salida
El microprocesador tiene puertos de entrada/salida en el mismo circuito integrado. El chipset es un conjunto de circuitos integrados que se encarga de realizar las funciones que el microprocesador delega en ellos. El conjunto de circuitos integrados auxiliares necesarios por un sistema para realizar una tarea suele ser conocido como chipset, cuya traducción literal del inglés significa conjunto de circuitos integrados. Se designa circuito integrado auxiliar al circuito integrado que es periférico a un sistema pero necesario para el funcionamiento del mismo. La mayoría de los sistemas necesitan más de un circuito integrado auxiliar; sin embargo, el término chipset se suele emplear en la actualidad cuando se habla sobre las placas base de los IBM PCs.
Chipset
El chipset es un conjunto de circuitos integrados diseñado para trabajar conjuntamente y generalmente vendido como un único producto. En el mundo de los computadores personales se disponían muchos circuitos integrados como apoyo al microprocesador tales como el controlador de interrupciones, controlador de acceso directo a memoria, controlador de reloj, etc. Para reducir el número de circuitos se fueron creando circuitos más complejos que incluían multiples funcionalidades en su interior. Esos circuitos son los que actualmente se denominan chipset del computador y son responsables en una medida importante del rendimiento global del mismo.
Se ha comparado al Chipset con la «médula espinal»: «una persona puede tener un buen cerebro, pero si la médula falla, todo el cuerpo no sirve para nada».
Las computadoras personales actuales tienen chipset formado por 2 circuitos auxiliares al procesador principal:
El puente norte que se utiliza como puente de enlace entre el microprocesador y la memoria, controlando los accesos hacia y desde el microprocesador, la memoria RAM, el puerto gráfico y las comunicaciones con el puente sur.
El puente sur que controla los dispositivos asociados, es decir se encarga de comunicar el procesador con el resto de los periféricos. (los controladores de disco, puertos de entrada y salida, como USB, etc.)
Evolución del microprocesador
- 1971: Intel 4004. Nota: Fue el primer microprocesador comercial. Salió al mercado el 15 de noviembre de 1971.
- 1972: Intel 8008
- 1974: Intel 8080, Intel 8085
- 1975: Signetics 2650, MOS 6502, Motorola 6800
- 1976: Zilog Z80
- 1978: Intel 8086, Motorola 68000
- 1979: Intel 8088
- 1982: Intel 80286, Motorola 68020
- 1985: Intel 80386, Motorola 68020, AMD80386
- 1987: Motorola 68030
- 1989: Intel 80486, Motorola 68040, AMD80486
- 1993: Intel Pentium, Motorola 68060, AMD K5, MIPS R10000
- 1995: Intel Pentium Pro
- 1997: Intel Pentium II, AMD K6, PowerPC G3, MIPS R120007
- 1999: Intel Pentium III, AMD K6-2, PowerPC G4
- 2000: Intel Pentium 4, Intel Itanium 2, AMD Athlon XP, AMD Duron, MIPS R14000
- 2003: PowerPC G5
- 2004: Intel Pentium M
- 2005: Intel Pentium D, Intel Extreme Edition con hyper threading, Intel Core Duo, AMD Athlon 64, AMD Athlon 64 X2, AMD Sempron 128.
- 2006: Intel Core 2 Duo, Intel Core 2 Extreme, AMD Athlon FX
- 2007: Intel Core 2 Quad, AMD Quad Core, AMD Quad FX
Intel 4004

El Intel 4004 (i4004), un CPU de 4bits, fue el primer microprocesador en un simple chip, así como el primero disponible comercialmente. Aproximadamente al mismo tiempo, algunos otros diseños de CPU en circuito integrado, tales como el militar F14 CADC de 1970, fueron implementados como chipsets, es decir constelaciones de múltiples chips.
Historia y descripción
El 4004 fue lanzado en un paquete de 16 pines CERDIP el 15 de noviembre de 1971. El 4004 fue el primer procesador de computadora diseñado y fabricado por el fabricante de chips Intel, quien previamente hacía semiconductores de chips de memoria. Marcian «Ted» Hoff formuló la propuesta arquitectónica en 1969. Sin embargo, la implementación del microprocesador sólo comenzó en 1970 cuando Federico Faggin fue empleado por Intel, procedente de Fairchild Semiconductor, para dirigir el proyecto y para diseñar el 4004. En Fairchild, Faggin había desarrolado la tecnología pionera llamada Silicon Gate Technology (SGT) y había también diseñado el primer circuito integrado MOS usando la tecnología SGT (el Fairchild 3708) en 1968. Tan pronto como empezó a trabajar para Intel, Faggin creó una nueva metodología de «random logic design» con silicon gate, que no existía previamente, y que la utlilizó para encajar el microprocesador en un único chip. Su metodología fue usada en todos los primeros diseños de microprocesadores de Intel (8008, 4040, 8080). Masatoshi Shima de Busicom asistió a Faggin durante el desarrollo de la familia 4004 y más tarde escribió el software para la calculadora Busicom. Shima se unió a la compañía ZiLOG, la primera compañía dedicada exclusivamente a microprocesadores, fundada por Federico Faggin a finales del 1974, y desarrolló el diseño del Z80 con Faggin.
Originalmente diseñado para la compañía japonesa Busicom para ser usado en su línea de calculadoras, el 4004 también fue proporcionado con una familia de chips de soporte especialmente diseñados para él. Por ejemplo, cada «ROM de programa» internamente guardaba para su propio uso los 12 bit de dirección de programa del 4004, lo que permitía, si las 16 ROM fueron instaladas, acceso de 4 KB de memoria desde el bus de direcciones de 4 bits. El circuito 4004 fue construido con 2.300 transistores, y fue seguido el año siguiente por el primer microprocesador de 8 bits, el 8008, que contenía 3.300 transistores, y el 4040, que era una versión revisada del 4004.
Como su cuarta entrada en el mercado de microprocesadores, Intel lanzó el CPU que comenzó la revolución del microcomputador, el 8080, usado en el Altair 8800.
Intel 80286
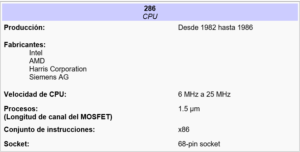
El Intel 80286 (llamado oficialmente iAPX 286, también conocido como i286 o 286) es un microprocesador de 16 bits de la familia x86, que fue lanzado al mercado por Intel el 1 de febrero de 1982. Las versiones iniciales del i286 funcionaban a 6 y 8 MHz, pero acabó alcanzando una velocidad de hasta 25 MHz. El i286 fue el microprocesador más empleado en los IBM PC y compatibles entre mediados y finales de los años 80 .
El i286 funciona el doble de rápido por ciclo de reloj que su predecesor (el Intel 8086) y puede direccionar hasta 16 MB de memoria RAM, en contraposición a 1 MB del i8086. En máquinas DOS, esta memoria adicional solo podía ser accedida a través de la memoria extendida o de emulación de memoria expandida previamente habilitada mediante software la memoria extendida. De todos modos, pocos ordenadores basados en el i286 tuvieron más de 1 MB de memoria.
El i286 fue diseñado para ejecutar aplicaciones multitarea, incluyendo comunicaciones (como centralitas automatizadas), control de procesos en tiempo real y sistemas multiusuario. Para ello se le añadió un modo protegido, en el cual existían cuatro anillos de ejecución y división de memoria mediante tablas de segmentos. En este modo trabajaban las versiones de 16 bits del sistema operativo OS/2. En este modo protegido se permitía el uso de toda la memoria directamente, y que además ofrecía protección entre aplicaciones para evitar la escritura de datos accidental (o malintencionada) fuera de la zona de memoria asignada. Sin embargo, una vez que el procesador entraba en el modo protegido, no podía volver al modo real sin resetear el procesador.
A pesar de su gran popularidad, hoy en día quedan pocos ordenadores con el i286 funcionando.
El sucesor del i286 fue el Intel 80386, de 32 bits.
Intel 80386

Arquitectura del 386DX.
El Intel 80386 (i386, 386) es un microprocesador CISC con arquitectura x86. Durante su diseño se le llamó ‘P3’, debido a que era el prototipo de la tercera generación x86. El i386 fue empleado como la unidad central de proceso de muchos ordenadores personales desde mediados de los años 80 hasta principios de los 90.
Fabricado y diseñado por Intel, el procesador i386 fue lanzado al mercado el 16 de octubre de 1985. Intel estuvo en contra de fabricarlo antes de esa fecha debido a que los costes de producción lo hubieran hecho poco rentable. Los primeros procesadores fueron enviados a los clientes en 1986. Del mismo modo, las placas base para ordenadores basados en el i386 eran al principio muy elaboradas y caras, pero con el tiempo su diseño se racionalizó.
En Mayo de 2006 Intel anunció que la fabricación del 386 finalizaría en a finales de Septiembre de 2007. [1] Aunque ha quedado obsoleto como CPU de ordenador personal, Intel ha seguido fabricando el chip para sistemas empotrados y tecnología aeroespacial.
Intel 80486

Intel 80486-SX / 33 MHz
Arquitectura del 486DX2
Los Intel 80486 (i486, 486) son una familia de microprocesadores de 32 bits con arquitectura x86 diseñados por Intel.
Los i486 son muy similares a sus predecesores, los Intel 80386. La diferencias principales son que los i486 tienen un conjunto de instrucciones optimizado, una unidad de coma flotante y un caché unificado integrados en el propio circuito integrado del microprocesador y una unidad de interfaz de bus mejorada. Estas mejoras hacen que los i486 sean el doble de rápidos que un i386 a la misma velocidad de reloj. De todos modos, algunos i486 de gama baja son más lentos que los i386 más rápidos.
La velocidades de reloj típicas para los i486 eran 16 MHz (no muy frecuente), 20 MHz (tampoco frecuente), 25 MHz, 33 MHz, 40 MHz, 50 MHz (típicamente con duplicación del reloj), 66 MHz (con duplicación del reloj), 75 MHz (con triplicación del reloj), 100 MHz (también con triplicación del reloj) y 120 MHz (con cuatriplicación de reloj en una variante de AMD, el Am486-DX5).
El sucesor del microprocesador i486 es el Intel Pentium.
Intel Pentium

Pentium MMX (P55C)
Los Intel Pentium son una gama de microprocesadores con arquitectura x86 producidos por la compañía Intel.
El microprocesador Pentium se lanzó al mercado el 22 de marzo de 1993, sucediendo al procesador Intel 80486. Intel no lo llamó 586 debido a que no es posible registrar una marca compuesta solamente de números y a que la competencia utilizaba hasta ahora los mismos números que Intel para sus procesadores equivalentes (AMD 486, IBM 486…). También es conocido por su nombre clave P54C.
Se descubrió en 1994, en el Intel Pentium, que algunos Pentium presentaron un error de división.
Los tipos de microprocesadores Intel Pentium que han salido al mercado son:
- 1993: Intel Pentium
- 1995: Intel Pentium Pro
- 1997: Intel Pentium II, con Intel Pentium MMX
- 1998: Intel Pentium II Xeon
- 1999: Intel Pentium III
- 2000: Intel Pentium III Xeon
- 2000: Intel Pentium 4
- 2001: Intel Xeon
- 2002: Intel Xeon MP, con tecnologías Hyper-Threading y NetBurst
- 2004: Intel Pentium M
- 2004: el 9 de mayo Intel anunció que los futuros procesadores Xeon estarían basados en la arquitectura Pentium M, el cual está basado en la arquitectura Pentium III, por lo que el «nuevo» Xeon puede ser más parecido al Pentium III Xeon que los Xeon basados en NetBurst.
- 2005: Intel Pentium D
- 2006: el 26 de junio Intel anunció la nueva generación Xeon Dual Core, con tecnología de doble núcleo.
- 2006: surge el microprocesador Intel Core 2 Duo, el cual marcó la desaparición de los microprocesadores de la familia Intel Pentium; para dar paso a una nueva generación tecnológica en microprocesadores.
- 2006: Intel Core 2 Quad Core y el Quad Core Extreme
Pentium Pro
De Wikipedia, la enciclopedia libre
(Redirigido desde Intel Pentium Pro)
Pentium Pro 256 KB
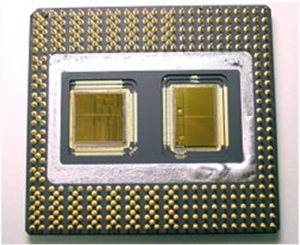
Pentium Pro 200 Mhz decapado, procesador a la izquierda y caché L2 256 KB a la derecha
El Pentium Pro es la sexta generación de arquitectura x86 de los microprocesadores de Intel, cuya meta era remplazar al Intel Pentium en toda la gama de aplicaciones, pero luego se centró como chip en el mundo de los servidores y equipos de sobremesa de gama alta. Posteriormente Intel lo dejó de lado a favor de su gama de procesadores de altas prestaciones llamada Xeon.
Fue puesto a la venta en noviembre de 1995. En su lanzamiento usaba un enorme Socket 8 de forma rectangular.
Características técnicas
A pesar del nombre, el Pentium Pro es realmente diferente de su procesador antecesor, el Intel Pentium, ya que estaba basado en el entonces nuevo núcleo P6 (que se vería modificado para luego ser usado en el Intel Pentium II, Intel Pentium III e Intel Pentium M). Además, utilizaba el Socket 8, en lugar del Socket 5 o 7 de los Pentium de la época. Las características del núcleo del P6 era la ejecución desordenada, ejecución especulativa y una tubería adicional para instrucciones sencillas. La ejecución especulativa (era la ejecución provisional de código después de un salto que no se sabía si iba a ser realizado), incrementaba considerablemente el fallo de despreciar un salto, y el Pentium Pro en aquel entonces usaba un algoritmo de predicción de saltos más sofisticado que el Pentium. Por la misma razón el Pentium Pro también introducía una instrucción de movimiento condicional (llamado cmov) que en alguno de los casos también podía ser usada para evitar la necesidad de una instrucción de salto.
Intel Pentium II
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
El Pentium II es un microprocesador con arquitectura x86 diseñado por Intel, introducido en el mercado el 7 de mayo de 1997. Está basado en una versión modificada del núcleo P6, usado por primera vez en el Intel Pentium Pro.
Los cambios fundamentales respecto a éste último fueron mejorar el rendimiento en la ejecución de código de 16 bits, añadir el conjunto de instrucciones MMX y eliminar la memoria caché de segundo nivel del núcleo del procesador, colocándola en una tarjeta de circuito impreso junto a éste.
El Pentium II se comercializó en versiones que funcionaban a una frecuencia de reloj de entre 166 y 450 MHz. La velocidad de bus era originalmente de 66 MHz, pero en las versiones a partir de los 333 MHz se aumentó a 100 MHz.
Poseía 32 KB de memoria caché de primer nivel repartida en 16 KB para datos y otros 16 KB para instrucciones. La caché de segundo nivel era de 512 KB y trabajaba a la mitad de la frecuencia del procesador, al contrario que en el Pentium Pro, que funcionaba a la misma frecuencia.
Como novedad respecto al resto de procesadores de la época, el Pentium II se presentaba en un encapsulado SEC, con forma de cartucho. El cambio de formato de encapsulado se hizo para mejorar la disipación de calor. Este cartucho se conecta a las placas base de los equipos mediante una ranura Slot 1.
El Pentium II integra 7,5 millones de transistores.
Intel Pentium III

El Pentium III es un microprocesador de arquitectura i686 fabricado por Intel; el cual es una modificación del Pentium Pro. Fue lanzado el 26 de febrero de 1999.
Las primeras versiones eran muy similares al Pentium II, siendo la diferencia más importante la introducción de las instrucciones SSE. Al igual que con el Pentium II, existía una versión Celeron de bajo presupuesto y una versión Xeon para quienes necesitaban de gran poder de cómputo. Esta línea ha sido eventualmente reemplazada por el Pentium 4, aunque la línea Pentium M, para equipos portátiles, está basada en el Pentium III.
Existen tres versiones de Pentium III: Katmai, Coppermine y Tualatin.

El Pentium 4 (erróneamente escrito Pentium IV) es un microprocesador de séptima generación basado en la arquitectura x86 y fabricado por Intel. Es el primer microprocesador con un diseño completamente nuevo desde el Pentium Pro de 1995. El Pentium 4 original, denominado Willamette, trabajaba a 1,4 y 1,5 GHz; y fue lanzado en noviembre de 2000.
Para la sorpresa de la industria informática, el Pentium 4 no mejoró el viejo diseño P6 según las dos tradicionales formas para medir el rendimiento: velocidad en el proceso de enteros u operaciones de coma flotante. La estrategia de Intel fue sacrificar el rendimiento de cada ciclo para obtener a cambio mayor cantidad de ciclos por segundo y una mejora en las instrucciones SSE. Al igual que los demás procesadores de Intel, el Pentium 4 se comercializa en una versión para equipos de bajo presupuesto (Celeron), y una orientada a servidores de gama alta (Xeon).
Las distintas versiones son: Willamette, Northwood, Extreme Edition, Prescott y Cedar Mill.
Versiones ya desarrolladas
Tejas y Jayhawk
Tejas era el nombre que Intel le había dado al microprocesador que sería el sucesor de los Prescott. Jayhawk sería un procesador similar al Tejas pero que estaría preparado para funcionar en máquina duales (es decir, un ordenador con dos procesadores, no es lo mismo que los procesadores dobles de más abajo). Sin embargo, en mayo de 2004 ambos proyectos fueron cancelados. De este modo, Intel remarcó el giro hacia los procesadores dobles.
A principios de 2003 Intel había mostrado un diseño preliminar del Tejas y un proyecto para ponerlo en el mercado en algún momento de 2004, pero finalmente lo pospuso para el 2005. Sin embargo, el 7 de mayo de 2004 Intel canceló el desarrollo de los procesadores, como ya se ha dicho. Tanto el retraso inicial como la eventual cancelación se atribuyen a los problemas de calor debido al gigantesco consumo energético de los microprocesadores, lo cual ya había sucedido con los Prescott que además tenían solo un rendimiento ligeramente mayor que los Northwood. Este cambio también obedeció a los deseos de Intel de enfocar sus esfuerzos en los microprocesadores dobles, para la gama Itanium de servidores, los Pentium de escritorio y las portátiles Centrino.
Doble Procesador
Intel tiene planeadas cuatro variantes con doble procesador del Pentium 4. La primera es denominada Paxville, que consiste en poco más que dos procesadores Prescott colocados en el mismo substrato. Le seguirá , situándose el más básico de los Core2 Duo (E6300, 1,86 GHz) por encima del más potente de los Pentium D (965 EE, 3,73 GHz). Esto se debe a que la arquitectura Core 2 Duo es muy eficiente, realiza mucho más trabajo por clock que NetBurst (Pentium 4); asemejándose al K8 (Athlon 64) de AMD en este sentido…
DualCore y QuadCore
Intel a principios de 2006 presenta sus últimos procesadores orientados a negocios, diseño, Juegos, con procesadores de dos y cuatro núcleos y velocidades de 1,7; 1,8; 2,1; 2,4; 2,5 Ghz. Aunque los precios del procesador de 4 núcleos (QuadCore) aún es muy alto es la muestra clara de que Intel seguirá al futuro incrementando los núcleos del procesador para aumentar velocidad y rendimiento multimedia. En Mayo de 2007 en televisión vía satélite Intel presento un equipo que incluía un procesador de 80 núcleos que, según los informantes del evento es el prototipo de los procesadores Intel para 2012.
PowerPC G5
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
El PowerPC G5 (nombre común del PowerPC 970 y del PowerPC 970FX) es un microprocesador de alto rendimiento con arquitectura RISC de 64 bits, pertenece a la familia PowerPC; diseñado y fabricado por IBM en 2002. El PowerPC 970 está construido usando tecnología de 130nm, y el 970FX, de 90 nm. Contienen más de 58 millones de transistores. Están basados en el desarrollo de los Power4 de IBM, e incluyen dos de los motores vectoriales VMX de IBM, en lugar de la unidad AltiVec usada en los G4 (PowerPC 74xx). Adicionalmente, son capaces de procesar instrucciones de 32-bit en modo nativo.
Tiene un rendimiento excepcional en comparación con otros procesadores y con una capacidad de direccionamiento de memoria hasta 8 GB.
Para mantener las convenciones de nombre adoptadas por Apple en su gama de ordenadores, denominó a éste procesador G5 en junio de 2003. El término G5 en éste contexto se identifica con la quinta generación de procesadores PowerPC utilizados por Apple, en su gama Power Mac G5. Desde entonces, el PowerPC 970FX ha reemplazado al PowerPC 970 en los ordenadores de Apple.
Intel Pentium M
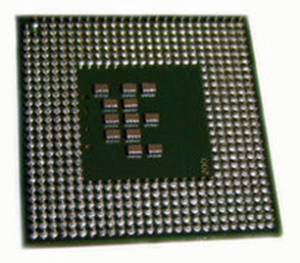
Pentium M core Dothan backside
Introducido en marzo de 2003, el Intel Pentium M es un microprocesador con arquitectura x86 (i686) diseñado y fabricado por Intel. El procesador fue originalmente diseñado para su uso en computadoras portátiles. Su nombre en clave antes de su introducción era «Banias». Todos los nombres clave del Pentium M son lugares de Israel, la ubicación del equipo de diseño del Pentium M.
Intel Pentium D
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
Los procesadores Pentium D fueron introducidos por Intel en el Spring 2005 Intel Developer Forum. Un chip Pentium D consiste básicamente en un procesador Pentium 4 con 2 nucleos Virtuales que a diferencia de los core duo y los core 2 duo está en la optimización realizada, ya que los de núcleo Prescott están diseñados para alcanzar más MHz, sin embargo, esto genera mucho calor, por lo que la nueva tecnología Core optimiza para que cada MHz sea más eficiente, por lo que a la misma o menor velocidad(en MHz)la nueva tecnología Core rinde mucho más y genera mucho menos calor. Ambos procesadores son DualCore (doble núcleo), por lo que constan de 2 procesadores físicos conectados entre sí directamente (Core Duo y Core 2 Duo) y a través del bus frontal FSB (Pentium D). Cabe destacar que los Pentium D ya son tecnología antigua, no de gama baja, simplemente fueron los primeros intentos de Intel por obtener un procesador de doble núcleo, y esto se perfeccionó en la nueva generación de los Core Duo y Core 2 Duo. Adicionalmente, los D se calientan más porque el núcleo Prescott es el último de esa generación, llevado al límite de frecuencias. Mientras que el Core 2 es la tecnología de los Pentium M (de laptop) que genera muy poco calor y recién está comenzando a ser explotada. Con un proceso de fabricación inicialmente de 90 nm y en su segunda generación de 65 nm. El nombre en clave del Pentium D antes de su lanzamiento era «Smithfield». Hubo un rumor que decia que estos chips incluian una tecnología DRM (Digital rights management) para hacer posible un sistema de protección anticopia de la mano de Microsoft, el cual Intel desmintio, aunque aclaró que algunos de sus chipsets si tenian dicha tecnologia, pero la extensión de ella y sus capacidades habian sido exageradas.
Intel Core 2 Duo

Produccion 2006 – ..
El microprocesador Core 2 Duo de Intel es la continuación de los Pentium D y Core Duo. Su distribución comenzó el 27 de julio de 2006.
Características
El Core 2 Duo es un procesador con un pipeline de 14 etapas lo que le permite escalar más en frecuencia que su antecesor directo: el Core 1, que tenía 12 etapas al igual que el Athlon 64. Tiene, además, un motor de ejecución ancho con tres ALUs, cuatro FPUs, y tres unidades de SSE de 128 bits. Estas dos características hacen que sea el procesador x86 que más instrucciones por ciclo puede lograr.
Entre otras características destacan arquitectura de 64 bits EM64T (no disponible en su predecesor Core Duo), Virtualization Technology, LaGrande Technology, Intel Enhanced SpeedStep Technology, Active Management Technology (iAMT2), MMX, SSE, SSE2, SSE3, SSSE3, y XD bit.
Existen versiones de sobremesa y para portátiles, a diferencia de la división existente desde 2003 entre Pentium M para portátiles y Pentium 4 para ordenadores de sobremesa, unificando el nombre de Core 2 Duo para todas los procesadores de gama media dejando además el nombre Pentium, utilizado desde 1993, para los procesadores de gama baja (y menor rendimiento) basados en la arquitectura de Core 2 con un caché reducido llamado Pentium Dual Core, quienes a su vez vienen a reemplazar a la familia Celeron en este rol.
Una llamativa característica de esta familia es su particular facilidad para aplicar overclock, llegando muchos de estos procesadores a ganancias superiores al 50% en su frecuencia de trabajo
Intel Core 2 Quad
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
Intel Core 2 Quad o Intel Core Quad son una serie de procesadores de Intel con 4 núcleos y de 64 bits. Según el fabricante, estos procesadores son un 70% más rápidos que los Core 2 Duo.
Intel tiene en mente lanzar los procesadores de 4 núcleos para portátiles en el primer semestre de 2008, con el nombre de «Penryn» y será una actualización de los denominados Intel Santa Rosa que se utilizan actualmente.
Para tratar de comprender el significado de un Sistema Operativo y sus principales características de un Sistema Operativo contemporáneo, es útil considerar como han ido evolucionando éstos con el tiempo.
A finales de los 40’s el uso de computadoras estaba restringido a aquellas empresas o instituciones que podían pagar su alto precio, y no existían los sistemas operativos. En su lugar, el programador debía tener un conocimiento y contacto profundo con el hardware, y en el infortunado caso de que su programa fallara, debía examinar los valores de los registros y paneles de luces indicadoras del estado de la computadora para determinar la causa del fallo y poder corregir su programa, además de enfrentarse nuevamente a los procedimientos de apartar tiempo del sistema y poner a punto los compiladores, ligadores, etc; para volver a correr su programa, es decir, enfrentaba el problema del procesamiento serial (serial processing ).
La importancia de los sistemas operativos nace históricamente desde los 50’s, cuando se hizo evidente que el operar una computadora por medio de tableros enchufables en la primera generación y luego por medio del trabajo en lote en la segunda generación se podía mejorar notoriamente, pues el operador realizaba siempre una secuencia de pasos repetitivos, lo cual es una de las características contempladas en la definición de lo que es un programa. Es decir, se comenzó a ver que las tareas mismas del operador podían plasmarse en un programa, el cual a través del tiempo y por su enorme complejidad se le llamó «Sistema Operativo». Así, tenemos entre los primeros sistemas operativos al Fortran Monitor System (FMS) e IBSYS.
Posteriormente, en la tercera generación de computadoras nace uno de los primeros sistemas operativos con la filosofía de administrar una familia de computadoras: el OS/360 de IBM. Fue este un proyecto tan novedoso y ambicioso que enfrentó por primera vez una serie de problemas conflictivos debido a que anteriormente las computadoras eran creadas para dos propósitos en general: el comercial y el científico. Así, al tratar de crear un solo sistema operativo para computadoras que podían dedicarse a un propósito, al otro o ambos, puso en evidencia la problemática del trabajo en equipos de análisis, diseño e implantación de sistemas grandes.
Surge también en la tercera generación de computadoras el concepto de la multiprogramación, porque debido al alto costo de las computadoras era necesario idear un esquema de trabajo que mantuviese a la unidad central de procesamiento más tiempo ocupada, así como el encolado (spooling ) de trabajos para su lectura hacia los lugares libres de memoria o la escritura de resultados. Sin embargo, se puede afirmar que los sistemas durante la tercera generación siguieron siendo básicamente sistemas de lote.
En la cuarta generación la electrónica avanza hacia la integración a gran escala, pudiendo crear circuitos con miles de transistores en un centímetro cuadrado de silicón y ya es posible hablar de las computadoras personales y las estaciones de trabajo. Surgen los conceptos de interfaces amigables intentando así atraer al público en general al uso de las computadoras como herramientas cotidianas. Se hacen populares el MS-DOS y UNIX en estas máquinas. También es común encontrar clones de computadoras personales y una multitud de empresas pequeñas ensamblándolas por todo el mundo.
Para mediados de los 80’s, comienza el auge de las redes de computadoras y la necesidad de sistemas operativos en red y sistemas operativos distribuidos. La red mundial Internet se va haciendo accesible a toda clase de instituciones y se comienzan a dar muchas soluciones al querer hacer convivir recursos residentes en computadoras con sistemas operativos diferentes.
Para los 90’s el paradigma de la programación orientada a objetos cobra auge, así como el manejo de objetos desde los sistemas operativos. Las aplicaciones intentan crearse para ser ejecutadas en una plataforma específica y poder ver sus resultados en la pantalla o monitor de otra diferente (por ejemplo, ejecutar una simulación en una máquina con UNIX y ver los resultados en otra con DOS). Los niveles de interacción se van haciendo cada vez más profundos.
¿Qué es un Sistema Operativo?
Un Sistema Operativo es un programa que actúa como intermediario entre el usuario y el hardware de un computador y su propósito es proporcionar un entorno en el cual el usuario pueda ejecutar programas. El objetivo principal de un Sistema Operativo es, entonces, lograr que el Sistema de Computación se use de manera cómoda, y el objetivo secundario es que el hardware del computador se emplee de manera eficiente. Un Sistema Operativo es una parte importante de cualquier sistema de computación, es un administrador de los recursos de hardware del sistema.
Un sistema de computación puede dividirse en cuatro componentes:
- el Hardware,
- el Sistema Operativo,
- los Programas de Aplicación
- los Usuarios.
El hardware (Unidad Central de Procesamiento (UCP), memoria y dispositivos de entrada/salida (E/S)) proporciona los recursos de computación básicos. Los programas de aplicación (compiladores, sistemas de bases de datos, juegos de vídeo y programas para negocios) definen la forma en que estos recursos se emplean para resolver los problemas de computación de los usuarios.
En parte, esto se debe a que los sistemas operativos realizan dos funciones diferentes:
- Proveer al usuario un ambiente en el cual el usuario pueda ejecutar programas de manera conveniente, protegiéndolo de los detalles y complejidades del hardware.
- Administrar eficientemente los recursos del computador cuando hay dos o más programas que ejecutan simultáneamente y requieren usar el mismo recurso (como tiempo de CPU, memoria o impresora). .
Además, en un sistema multiusuario, suele ser necesario o conveniente compartir, además de dispositivos físicos, información. Al mismo tiempo, debe tenerse en cuenta consideraciones de seguridad: por ejemplo, la información confidencial solo debe ser accedida por usuarios autorizados, un usuario cualquiera no debiera ser capaz de sobrescribir áreas críticas del sistema, etc. (En este caso, un usuario puede ser una persona, un programa, u otro computador). En resumen, el sistema operativo debe llevar la cuenta acerca de quién está usando qué recursos; otorgar recursos a quienes los solicitan (siempre que el solicitante tenga derechos adecuados sobre el recurso); y arbitrar en caso de solicitudes conflictivas.
Las tareas que realiza un Sistema Operativo son las siguientes:
-Realizar el interfaz sistema-usuario.
-Compartir los recursos de Hardware entre los usuarios.
-Permitir a los usuarios compartir sus datos entre ellos.
-Prevenir que las actividades de un usuario no interfieran en las de los demás usuarios.
-Calendarizar los recursos de los usuarios.
-Facilitar el acceso a los dispositivos de E/S.
-Recuperarse de fallas o errores.
-Llevar el control sobre el uso de los recursos.
-Entre otras.
Los componentes principales de un sistema operativo son los siguientes módulos:
-Manejo de procesos.
-Manejo de E/S.
-Manejo de Memoria.
-Manejo del Sistema de Archivos.
Las características de un Sistema Operativo.
En general, se puede decir que un Sistema Operativo tiene las siguientes características:
Conveniencia. Un Sistema Operativo hace más conveniente el uso de una computadora.
Eficiencia. Un Sistema Operativo permite que los recursos de la computadora se usen de la manera más eficiente posible.
Habilidad para evolucionar. Un Sistema Operativo deberá construirse de manera que permita el desarrollo, prueba o introducción efectiva de nuevas funciones del sistema sin interferir con el servicio.
Administrar el hardware. El Sistema Operativo se encarga de manejar de una mejor manera los recursos de la computadora en cuanto a hardware se refiere, esto es, asignar a cada proceso una parte del procesador para poder compartir los recursos.
Relacionar dispositivos. El Sistema Operativo se debe encargar de comunicar a los dispositivos periféricos, cuando el usuario así lo requiera.
Organizar datos para acceso rápido y seguro.
Manejar las comunicaciones en red. El Sistema Operativo permite al usuario manejar con alta facilidad todo lo referente a la instalación y uso de las redes de computadoras.
Facilitar las entradas y salidas. Un Sistema Operativo debe hacerle fácil al usuario el acceso y manejo de los dispositivos de Entrada/Salida de la computadora.
Técnicas de recuperación de errores. A fin de documentar las causas que lo originan y poder prevenir y mejorar su funcionalidad.
Evita que otros usuarios interfieran. El Sistema Operativo evita que los usuarios se bloqueen entre ellos, informándoles si esa aplicación está siendo ocupada por otro usuario.
Generación de estadísticas.
Tipos de Sistemas Operativos.
Los sistemas operativos pueden ser basados en caracteres o gráficos. Un sistema operativo basado en caracteres, tal como MS-DOS, le permite escribir comandos en un indicador para controlar la computadora.
Una interfaz gráfico del usuario, o GUI, le permite enviar comandos a la computadora al hacer clic en iconos o al seleccionar elementos en los menús. Windows cuenta con un GUI.
La mayoría de los sistemas operativos pueden manejar programas de 16, 32 o 64 bits, o todos.
Sistemas Operativos por Servicios.
Esta clasificación es la más comúnmente usada y conocida desde el punto de vista del usuario final. Esta clasificación se comprende fácilmente con el cuadro sinóptico que a continuación se muestra:
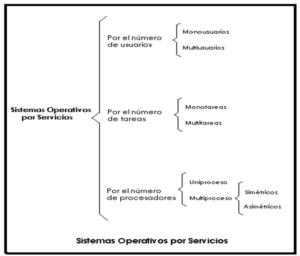
- Por Número de Usuarios:
Sistema Operativo Monousuario.
Son aquéllos que soportan a un usuario a la vez, Las computadoras personales típicamente se han clasificado en este renglón.
Sistema Operativo Multiusuario.
Son capaces de dar servicio a más de un usuario a la vez, ya sea por medio de varias terminales conectadas a la computadora o por medio de sesiones remotas en una red de comunicaciones.
- Por el Número de Tareas:
Sistema Operativo Monotarea.
Son aquellos que sólo permiten una tarea a la vez por usuario. Puede darse el caso de un sistema multiusuario y monotarea, en el cual se admiten varios usuarios al mismo tiempo pero cada uno de ellos puede estar haciendo solo una tarea a la vez.
Sistema Operativo Multitarea.
Un sistema operativo multitarea es aquél que le permite al usuario estar realizando varias labores al mismo tiempo y la computadora procesa varias tareas al mismo tiempo.
- Por el Número de Procesadores:
Sistema Operativo de Uniproceso.
Es aquél que es capaz de manejar solamente un procesador de la computadora, de manera que si la computadora tuviese más de uno le sería inútil. El ejemplo más típico de este tipo de sistemas es el DOS y MacOS.
Sistema Operativo de Multiproceso.
Se refiere al número de procesadores del sistema, que es más de uno y éste es capaz de usarlos todos para distribuir su carga de trabajo. Generalmente estos sistemas trabajan de dos formas: simétrica o asimétricamente.
Asimétrica.
Cuando se trabaja de manera asimétrica, el sistema operativo selecciona a uno de los procesadores el cual jugará el papel de procesador maestro y servirá como pivote para distribuir la carga a los demás procesadores, que reciben el nombre de esclavos.
Simétrica.
Cuando se trabaja de manera simétrica, los procesos o partes de ellos (threads) son enviados indistintamente a cual quiera de los procesadores disponibles, teniendo, teóricamente, una mejor distribución y equilibrio en la carga de trabajo bajo este esquema.
Sistemas Operativos también se pueden clasificar como:
Sistema Operativo de Red.
Aquellos que tiene la capacidad de interactuar con sistemas operativos en otras computadoras por medio de un medio de transmisión con el objeto de intercambiar información, transferir archivos, ejecutar comandos remotos y un sin fin de otras actividades.
Los Sistemas Operativos de red más ampliamente usados son: Novell Netware, Personal Netware, LAN Manager, Windows NT Server, UNIX, LANtastic.
Sistemas Operativos Distribuidos.
Abarcan los servicios de los de red, logrando integrar recursos ( impresoras, unidades de respaldo, memoria, procesos, unidades centrales de proceso ) en una sola máquina virtual que el usuario accesa en forma transparente. Es decir, ahora el usuario ya no necesita saber la ubicación de los recursos, sino que los conoce por nombre y simplemente los usa como si todos ellos fuesen locales a su lugar de trabajo habitual.
Entre los diferentes Sistemas Operativos distribuidos que existen tenemos los siguientes: Sprite, Solaris-MC, Mach, Chorus, Spring, Amoeba, Taos, etc.
Sistemas Operativos más usuales e importantes:
MSDOS Windows,:
Desde hace años, Microsoft intentaba unificar las dos grandes vertientes de Windows. La serie WIN9X y la serie NT. Recordemos primero un poquito estas dos series totalmente diferentes de Windows, el porqué nacieron y la necesidad actual de converger ambos sistemas. Hagamos un poco historia…
El primer sistema operativo de Microsoft surgió en el año 82 cuando surgió el primer ordenador de sobremesa: el IBM PC. Dicho sistema operativo era el MS-DOS. IBM, como gigante de la informática empresarial (grandes mainframes) decidió embarcarse en la tarea de definir un ordenador personal aprovechando que Intel acababa de desarrollar el procesador 8088. Definió un bus: el bus PC, que en poco tiempo pasó a ser el bus AT, con lo cual quedaba plasmada la arquitectura física de los ordenadores personales y de cuya herencia todavía no hemos podido escaparnos.
La evolución posterior del 8088 fue el 8086, 80286, 80386. De esta última arquitectura (la 386) son herederos el resto de procesadores de Intel: el 80486 (el 486) y la familia Pentium al completo, de tal manera que el juego de instrucciones ensambladoras de la CPU se conserve íntegro desde la familia 386 (con una sola nueva instrucción) y que posteriormente se implementó dentro del procesador el coprocesador matemático y los juegos de instrucción MMX, orientados a la multimedia.
Posteriormente el MS-DOS continuó su evolución hasta la versión 6.22.
y empezó a desarrollarse por parte de Microsoft un sistema operativo grafico (o mejor, llamémosle, interfaz gráfica sobre dicho MS-DOS) que se denominó Windows. Fueron surgiendo las versiones 1 y 2 (prácticamente de pruebas)… hasta que Microsoft lanzó su gran primera versión: Windows 3 que rápidamente evolucionó a Windows 3.1
Windows NT
Llegado al punto de la existencia de Windows 3.1, Microsoft ya tenía definido el API ( Interfaz de Programación de Aplicaciones: Conjunto de rutinas que utiliza una aplicación para solicitar y realizar servicios y llevar a cabo tareas de mantenimiento como administrar archivos y mostrar información) de programación de Windows prácticamente al completo y bastante depurado. Únicamente existían dos «pequeños» problemas: todo el subsistema era de 16 bits y además se apoyaba sobre MS-DOS. Realmente no era más que una interfaz (potente) sobre MS-DOS, digamos que simplemente era la GUI de DOS. La multitarea no era real sino que los programas debían ceder el control al sistema operativo y este, una vez que tomaba el control, daba paso a la siguiente tarea que tenía encolada. Todo esto se realizaba muchas veces por segundo si las aplicaciones cedían control dando la sensación de multitarea real.
Por ello, Microsoft se planteó el realizar un verdadero sistema operativo, de 32 bits y además utilizando las características que le daban los nuevos procesadores de Intel. Microsoft estaba pensando ya en Windows NT.
Si nos fijamos con detalle en el kernel de NT, podemos ver que el sistema de archivos nativo ya deja de ser FAT y aparece un nuevo sistema de archivos: el NTFS.
Así salió al mercado el primer Windows NT, el NT 3.1 que rápidamente evolucionó al 3.5 y con unas modificaciones en el núcleo para darle velocidad (y perdida de estabilidad como comentaremos más adelante) evolucionó al Windows NT4.
Windows 95 y posteriores
Paralelamente a los primeros desarrollos de Windows NT 3.1, Microsoft empezó a intuir el gran potencial que podía tener Internet y el aumento progresivo de usuarios tanto domésticos como corporativos que no tenían necesidad de un Windows NT, pero para los cuales la actual solución de Windows 3.1 se quedaba escasa.
Microsoft empezó a experimentar con la versión de Windows 3.11 (para trabajo en grupo), la conectividad de red y el soporte en redes así como los primeros pasos para algunos subsistemas de 32 bits dentro del propio Windows.. Igualmente, creó una capa API de 32 bits que era capaz de instalarse sobre Windows 3.1 o 3.11 y daba soporte a programas de 32 bits. Con las experiencias anteriores, Microsoft ya tenía en la mano la posibilidad de hacer evolucionar Windows.
Así surgió el primer Windows de la serie 9X. Windows 95. Realmente no sigue siendo más que una interfaz gráfica sobre MS-DOS, pero mejorado.
La evolución de W95, fue Windows 98. Podemos decir que prácticamente, la serie Win9X murió en W98. Tanto W98 SE como ME, no aportan nada nuevo. En este momento, empezó a estudiarse el sistema operativo que más tarde se denominó W2000.
Windows 2000
Inicialmente, Windows 2000 se gestó como el sucesor y el integrador de todos los Windows. La idea original pasaba por incorporar en Windows 2000 las características de PnP (Plug and Play) y resto de subsistemas probados y experimentados en la serie de Windows al consumo (9X) y por tanto, el producto final que salió al mercado, siguió siendo un NT puro (mejorado en muchísimas características), Windows 2000, no solo integró las nuevas tecnologías de soporte a hardware (PnP) realmente completo, sino que además integró y mejoró las funcionalidades definidas por las normas ACPI. Advanced Configuration and Power Interface) define una interfaz flexible y extensible de hardware para las tarjetas de sistema. ACPI permite al sistema operativo dirigir la administración de energía de una amplia variedad de equipos portátiles, de sobremesa, servidores y periféricos.
Otra de las grandes innovaciones en Windows 2000 fue el desarrollo del Active Directory.
cataloga la información acerca de todos los objetos de una red, incluidos usuarios, equipos e impresoras, y distribuye la información por toda la red. Active Directory proporciona un modo coherente para dar nombre, describir, buscar, tener acceso, administrar y asegurar información sobre estos recursos individuales. La seguridad está integrada en Active Directory mediante la autenticación de inicio de sesión y el control de acceso.
Windows XP y Windows .NET
La evolución final de W2000 y la integración con algunos de los subsistemas probados con éxito en Windows ME, así como la corrección de errores de W2000, ha sido Windows XP.
Igualmente, había que dar nuevas funcionalidades que hiciesen que el usuario domestico se sintiese más a gusto con Windows XP. Entre ellas, una mejora de la capacidad multimedia, capacidad de grabación básica de CD’s, cortafuegos personal, soporte de voz (para versiones USA) y otras decenas de funcionalidades que hiciesen a XP un producto apetecible.
– Netware
Diseñado por Novell, líder mundial en sistemas operativos para redes de computadoras que ha conquistado al mundo de la informática por el poder y versatilidad de sus funciones, así como su extremada capacidad de interconectar computadoras y recursos de tan variadas capacidades y marcas.
– Unix
Sistema operativo portable de alto rendimiento, multitarea y multiusuario utilizado actualmente en grandes proyectos y para necesidades de intercomunicación a nivel internacional y de gran volumen de operaciones diarias. Unix (registrado oficialmente como UNIX®) desarrollado, en principio, en 1969 por un grupo de empleados de los laboratorios Bell de AT&T.
Linux
Es la denominación de un sistema operativo tipo Unix (también conocido como GNU/Linux) y el nombre de un núcleo. Es uno de los ejemplos más prominentes del software libre y del desarrollo del código abierto, cuyo código fuente está disponible públicamente, para que cualquier persona pueda libremente usarlo, estudiarlo, redistribuirlo, comercializarlo y, con los conocimientos informáticos adecuados, modificarlo[.
El común denominador de la gente piensa que Linux es gratuito, sin embargo oficialmente es libre y se distribuye bajo la Licencia Pública General de GNU. Pese a lo anterior casi todas las distribuciones están exentas de costo alguno. En algunos casos una distribución tiene una versión gratuita y otra comercial como ocurre con SUSE y openSUSE o Mandriva One y Mandriva PowerPack.
Solaris
Es un sistema operativo desarrollado por Sun Microsystems. Es un sistema certificado como una versión de UNIX. Aunque Solaris en sí mismo aún es software propietario, la parte principal del sistema operativo se ha liberado como un proyecto de software libre denominado Opensolaris. Solaris puede considerarse uno de los sistemas operativos más avanzados. Sun denomina así a su sistema operativo.
Seguridad de un Sistema Operativo.
En los sistemas operativos se requiere tener una buena seguridad informática, tanto del hardware, programas y datos, previamente haciendo un balance de los requerimientos y mecanismos necesarios. Con el fin de asegurar la integridad de la información contenida.
Dependiendo de los mecanismos utilizados y de su grado de efectividad, se puede hablar de sistemas seguros e inseguros. En primer lugar, deben imponerse ciertas características en el entorno donde se encuentra la instalación de los equipos, con el fin de impedir el acceso a personas no autorizadas, mantener un buen estado y uso del material y equipos, así como eliminar los riesgos de causas de fuerza mayor, que puedan destruir la instalación y la información contenida.
En la actualidad son muchas las violaciones que se producen en los sistemas informáticos, en general por acceso de personas no autorizadas que obtienen información confidencial pudiendo incluso manipularla. En ocasiones este tipo de incidencias resulta grave por la naturaleza de los datos; por ejemplo si se trata de datos bancarios, datos oficiales que puedan afectar a la seguridad de los estados, etc.
El software mal intencionado que se produce por diversas causas, es decir pequeños programas que poseen gran facilidad para reproducirse y ejecutarse, cuyos efectos son destructivos nos estamos refiriendo a los virus informáticos.
Para esto, se analizan cuestiones de seguridad desde dos perspectivas diferentes la seguridad externa y la seguridad interna.
Todos los mecanismos dirigidos a asegurar el sistema informático sin que el propio sistema intervenga en el mismo se engloban en lo que podemos denominar seguridad externa.
La seguridad externa puede dividirse en dos grandes grupos:
Seguridad física. Engloba aquellos mecanismos que impiden a los agentes físicos la destrucción de la información existente en el sistema; entre ellos podemos citar el fuego, el humo, inundaciones descargas eléctricas, campos magnéticos, acceso físico de personas con no muy buena intención, entre otros.
Seguridad de administración. Engloba los mecanismos más usuales para impedir el acceso lógico de personas físicas al sistema.
Todos los mecanismos dirigidos a asegurar el sistema informático, siendo el propio sistema el que controla dichos mecanismos, se engloban en lo que podemos denominar seguridad interna.
Concepto
Al desarrollarse las primeras computadoras electrónicas, se vio la necesidad de programarlas, es decir, de almacenar en memoria la información sobre la tarea que iban a ejecutar. Las primeras se usaban como calculadoras simples; se les indicaban los pasos de cálculo, uno por uno.
John Von Neumann desarrolló el modelo que lleva su nombre, para describir este concepto de «programa almacenado». En este modelo, se tiene una abstracción de la memoria como un conjunto de celdas, que almacenan simplemente números. Estos números pueden representar dos cosas: los datos, sobre los que va a trabajar el programa; o bien, el programa en sí.
Así aparecen las secuencias de posiciones de llaves eléctricas que debían conectarse para obtener una acción determinada, una llave conectada era un 1 y una llave desconectada era un 0. Una sucesión de llaves en cualquiera de sus dos posiciones definía una secuencia de ceros y unos (por ejemplo: 0100011010011101…) que venía a representar una instrucción o un conjunto de instrucciones (programa) para el ordenador (o computador) en el que se estaba trabajando. A esta primera forma de especificar programas para una computadora se la denomina lenguaje máquina o código máquina.
La necesidad de recordar secuencias de programación para las acciones usuales llevó a denominarlas con nombres fáciles de memorizar y asociar: ADD (sumar), SUB (restar), MUL (multiplicar), CALL (ejecutar subrutina), etc. A esta secuencia de posiciones se le denominó «instrucciones», y a este conjunto de instrucciones se le llamó lenguaje ensamblador.
Posteriormente aparecieron diferentes lenguajes de programación, los cuales reciben su denominación porque tienen una estructura sintáctica similar a los lenguajes escritos por los humanos.
Pero que es en sí un lenguaje de programación:
Es un lenguaje que puede ser utilizado para controlar el comportamiento de una máquina, particularmente una computadora. Consiste en un conjunto de símbolos y reglas sintácticas y semánticas que definen su estructura y el significado de sus elementos y expresiones.
Aunque muchas veces se usa lenguaje de programación y lenguaje informático como si fuesen sinónimos, no tiene por qué ser así, ya que los lenguajes informáticos engloban a los lenguajes de programación y a otros más, como, por ejemplo, el HTML (lenguaje para el marcado de páginas web).
Un lenguaje de programación permite a uno o más programadores especificar de manera precisa: sobre qué datos una computadora debe operar, cómo deben ser estos almacenados y transmitidos y qué acciones debe tomar bajo una variada gama de circunstancias. Todo esto, a través de un lenguaje que intenta estar relativamente próximo al lenguaje humano o natural, tal como sucede con el lenguaje Léxico..
Los procesadores usados en las computadoras son capaces de entender y actuar según lo indican programas escritos en un lenguaje fijo llamado lenguaje de máquina. Todo programa escrito en otro lenguaje puede ser ejecutado de dos maneras:
Mediante un programa que va adaptando las instrucciones conforme son encontradas. A este proceso se lo llama interpretar y a los programas que lo hacen se los conoce como intérpretes.
Traduciendo este programa al programa equivalente escrito en lenguaje de máquina. A ese proceso se lo llama compilar y al traductor se lo conoce como compilador
Objetivo
El propósito de un lenguaje es sencillamente el de transferir significado.
Confucio
Los lenguajes de programación son el corazón de la Informática, ya que son las herramientas que se usan para comunicarse no sólo con el computador sino con la gente.
El desafío que representa el diseño de un lenguaje es el de “juntar de manera adecuada” diferentes ideas y características, que permitan al programador la expresión clara de los algoritmos.
Un lenguaje de programación permite a uno o más programadores especificar de manera precisa: sobre qué datos una computadora debe operar, cómo deben ser estos almacenados y transmitidos y qué acciones debe tomar bajo una variada gama de circunstancias. Todo esto, a través de un lenguaje que intenta estar relativamente próximo al lenguaje humano o natural, tal como sucede con el lenguaje Léxico. Una característica relevante de los lenguajes de programación es precisamente que más de un programador puedan tener un conjunto común de instrucciones que puedan ser comprendidas entre ellos para realizar la construcción del programa de forma colaborativa
Asimismo, el lenguaje de programación está conformado por una serie de reglas sintácticas y semánticas que serán utilizadas por el programador y a través de las cuales creará un programa o subprograma. Por otra parte, las instrucciones que forman dicho programa son conocidas como código fuente.
La particularidad es que ese lenguaje que utiliza le permite hacer las especificaciones en forma precisa, esto significa que todo se interpreta de la misma manera, sea quien fuere el programador que lo realice. Esto lo diferencia, por ejemplo, del lenguaje humano, en el que no siempre las especificaciones se interpretan de la misma manera.
Las computadoras no entienden matices, no resuelven contradicciones, ni realizan deducciones fruto de la experiencia. Por ello, los programas deberán estar escritos de una forma rigurosa:
- Sin errores sintácticos
- Sin contradicciones
- Sin omisiones
Los errores sintácticos producen programas incomprensibles para la computadora
- programas que no se pueden ejecutar
- Las contradicciones u omisiones (errores lógicos), producen programas que posiblemente no se ejecuten como el programador ha previsto. Suelen ser por ello, más difíciles de detectar
Los ordenadores son quisquillosos. Una simple coma (,) de más, de menos, o fuera de lugar, puede producir errores sintácticos o errores lógicos (dependiendo del contexto, del lenguaje, etc.)
Una característica relevante de los lenguajes de programación es precisamente que más de un programador puedan tener un conjunto común de instrucciones que puedan ser comprendidas entre ellos para realizar la construcción del programa de forma colaborativa
Resumiendo el objetivo de un lenguaje de programación es el permitir de la manera mas sencilla el interactuar del hombre con la computadora para que lleve a cabo una tarea determinada.
Clasificación de los lenguajes de programación
Los lenguajes de programación se determinan según el nivel de abstracción, Según la forma de ejecución y Según el paradigma de programación que poseen cada uno de ellos y esos pueden ser:
Según su nivel de abstracción
Lenguajes de bajo nivel
Los lenguajes de bajo nivel son lenguajes de programación que se acercan al funcionamiento de una computadora. El lenguaje de más bajo nivel es, por excelencia, el código máquina. A éste le sigue el lenguaje ensamblador, ya que al programar en ensamblador se trabajan con los registros de memoria de la computadora de forma directa.
La programación en un lenguaje de bajo nivel como el lenguaje de la máquina o el lenguaje simbólico tiene ciertas ventajas:
- Mayor adaptación al equipo.
- Posibilidad de obtener la máxima velocidad con mínimo uso de memoria.
Pero también tiene importantes inconvenientes:
- Imposibilidad de escribir código independiente de la máquina.
- Mayor dificultad en la programación y en la comprensión de los programas.
Por esta razón, a finales de los años 1950 surgió un nuevo tipo de lenguajes de programación que evitaba estos inconvenientes, a costa de ceder un poco en las ventajas. Estos lenguajes se llaman «de tercera generación» o «de alto nivel», en contraposición a los «de bajo nivel» o «de nivel próximo a la máquina».
Lenguajes de medio nivel
.Es un lenguaje de programación informática como el lenguaje C, que se encuentran entre los lenguajes de alto nivel y los lenguajes de bajo nivel.
Suelen ser clasificados muchas veces de alto nivel, pero permiten ciertos manejos de bajo nivel. Son precisos para ciertas aplicaciones como la creación de sistemas operativos, ya que permiten un manejo abstracto (independiente de la máquina, a diferencia del ensamblador), pero sin perder mucho del poder y eficiencia que tienen los lenguajes de bajo nivel.
Una característica distintiva, por ejemplo, que convierte a C en un lenguaje de medio nivel y al Pascal en un lenguaje de alto nivel es que en el primero es posible manejar las letras como si fueran números (en Pascal no), y por el contrario en Pascal es posible concatenar las cadenas de caracteres con el operador suma y copiarlas con la asignación (en C es el usuario el responsable de llamar a las funciones correspondientes).
Lenguajes de alto nivel
Los lenguajes de alto nivel son normalmente fáciles de aprender porque están formados por elementos de lenguajes naturales, como el inglés. En BASIC, el lenguaje de alto nivel más conocido, los comandos como «IF CONTADOR = 10 THEN STOP» pueden utilizarse para pedir a la computadora que pare si CONTADOR es igual a 10. Por desgracia para muchas personas esta forma de trabajar es un poco frustrante, dado que a pesar de que las computadoras parecen comprender un lenguaje natural, lo hacen en realidad de una forma rígida y sistemática.
Los lenguajes de programación de alto nivel se caracterizan por expresar los algoritmos de una manera adecuada a la capacidad cognitiva humana, en lugar de a la capacidad ejecutora de las máquinas. En los primeros lenguajes de alto nivel la limitación era que se orientaban a un área específica y sus instrucciones requerían de una sintaxis predefinida. Se clasifican como lenguajes procedimentales. Otra limitación de los lenguajes de alto nivel es que se requiere de ciertos conocimientos de programación para realizar las secuencias de instrucciones lógicas. Los lenguajes de muy alto nivel se crearon para que el usuario común pudiese solucionar tal problema de procesamiento de datos de una manera más fácil y rápida.
Según la forma de ejecución
Lenguajes compilados
Naturalmente, un programa que se escribe en un lenguaje de alto nivel también tiene que traducirse a un código que pueda utilizar la máquina. Los programas traductores que pueden realizar esta operación se llaman compiladores. Éstos, como los programas ensambladores avanzados, pueden generar muchas líneas de código de máquina por cada proposición del programa fuente. Se requiere una corrida de compilación antes de procesar los datos de un problema.
Los compiladores son aquellos cuya función es traducir un programa escrito en un determinado lenguaje a un idioma que la computadora entienda (lenguaje máquina con código binario).
Al usar un lenguaje compilado (como lo son los lenguajes del popular Visual Studio de Microsoft), el programa desarrollado nunca se ejecuta mientras haya errores, sino hasta que luego de haber compilado el programa, ya no aparecen errores en el código.
Un lenguaje compilado es término un tanto impreciso para referirse a un lenguaje de programación que típicamente se implementa mediante un compilador. Esto implica que una vez escrito el programa, éste se traduce a partir de su código fuente por medio de un compilador en un archivo ejecutable para una determinada plataforma (por ejemplo Solaris para Sparc, Windows NT para Intel, etc.).
Es teóricamente posible escribir un compilador o un intérprete para cualquier lenguaje, sin embargo en algunos lenguajes una u otra implementación es más sencilla porque se diseñaron con una implementación en particular en mente.
Algunos entornos de programación incluyen los dos mecanismos, primero el código fuente se traduce a un código intermedio que luego se interpreta en una máquina virtual, pero que también puede compilarse justo antes de ejecutarse. La máquina virtual y los compiladores Just in Time de Java son un ejemplo de ello.
Algunos ejemplos típicos de lenguajes compilados:
- Fortran
- La familia de lenguajes de C, incluyendo C++ y Objective C pero no Java.
- Ada, Pascal (incluyendo su dialecto Delphi)
- Algol
Lenguajes interpretados
Se puede también utilizar una alternativa diferente de los compiladores para traducir lenguajes de alto nivel. En vez de traducir el programa fuente y grabar en forma permanente el código objeto que se produce durante la corrida de compilación para utilizarlo en una corrida de producción futura, el programador sólo carga el programa fuente en la computadora junto con los datos que se van a procesar. A continuación, un programa intérprete, almacenado en el sistema operativo del disco, o incluido de manera permanente dentro de la máquina, convierte cada proposición del programa fuente en lenguaje de máquina conforme vaya siendo necesario durante el proceso de los datos. No se graba el código objeto para utilizarlo posteriormente.
La siguiente vez que se utilice una instrucción, se le debe interpretar otra vez y traducir a lenguaje máquina. Por ejemplo, durante el procesamiento repetitivo de los pasos de un ciclo, cada instrucción del ciclo tendrá que volver a ser interpretado cada vez que se ejecute el ciclo, lo cual hace que el programa sea más lento en tiempo de ejecución (porque se va revisando el código en tiempo de ejecución) pero más rápido en tiempo de diseño (porque no se tiene que estar compilando a cada momento el código completo). El intérprete elimina la necesidad de realizar una corrida de compilación después de cada modificación del programa cuando se quiere agregar funciones o corregir errores; pero es obvio que un programa objeto compilado con antelación deberá ejecutarse con mucha mayor rapidez que uno que se debe interpretar a cada paso durante una corrida de producción.
Según el paradigma de programación
Un paradigma de programación representa un enfoque particular o filosofía para la construcción del software. No es mejor uno que otro sino que cada uno tiene ventajas y desventajas. También hay situaciones donde un paradigma resulta más apropiado que otro.
Atendiendo al paradigma de programación, se pueden clasificar los lenguajes en :
Lenguajes imperativos
La programación imperativa, en contraposición a la programación declarativa es un paradigma de programación que describe la programación en términos del estado del programa y sentencias que cambian dicho estado. Los programas imperativos son un conjunto de instrucciones que le indican al computador cómo realizar una tarea.
La implementación de hardware de la mayoría de computadores es imperativa; prácticamente todo el hardware de los computadores está diseñado para ejecutar código de máquina, que es nativo al computador, escrito en una forma imperativa. Esto se debe a que el hardware de los computadores implementa el paradigma de las Máquinas de Turing. Desde esta perspectiva de bajo nivel, el estilo del programa está definido por los contenidos de la memoria, y las sentencias son instrucciones en el lenguaje de máquina nativo del computador (por ejemplo el lenguaje ensamblador).
Los lenguajes imperativos de alto nivel usan variables y sentencias más complejas, pero aún siguen el mismo paradigma. Las recetas y las listas de revisión de procesos, a pesar de no ser programas de computadora, son también conceptos familiares similares en estilo a la programación imperativa; cada paso es una instrucción, y el mundo físico guarda el estado.
Los primeros lenguajes imperativos fueron los lenguajes de máquina de los computadores originales. En estos lenguajes, las instrucciones fueron muy simples, lo cual hizo la implementación de hardware fácil, pero obstruyendo la creación de programas complejos. Fortran, cuyo desarrollo fue iniciado en 1954 por John Backus en IBM, fue el primer gran lenguaje de programación en superar los obstáculos presentados por el código de máquina en la creación de programas complejos.
Algunos lenguajes imperativos
- ASP
- BASIC
- C
- C#
- C++
- Fortran
- Java
- Perl
- PHP
Lenguajes Funcionales
Los matemáticos desde hace un buen tiempo están resolviendo problemas usando el concepto de función. Una función convierte ciertos datos en resultados. Si supiéramos cómo evaluar una función, usando la computadora, podríamos resolver automáticamente muchos problemas. Así pensaron algunos matemáticos, que no le tenían miedo a la máquina, e inventaron los lenguajes de programación funcionales. Además, aprovecharon la posibilidad que tienen las funciones para manipular datos simbólicos, y no solamente numéricos, y la propiedad de las funciones que les permite componer, creando de esta manera, la oportunidad para resolver problemas complejos a partir de las soluciones a otros más sencillos. También se incluyó la posibilidad de definir funciones recursivamente.
Un lenguaje funcional ofrece conceptos que son muy entendibles y relativamente fáciles de manejar para todos los que no se durmieron en las clases de matemáticas. El lenguaje funcional más antiguo, y seguramente el más popular hasta la fecha, es LISP, diseñado por McCarthy [1] en la segunda mitad de los años 50. Su área de aplicación es principalmente la Inteligencia Artificial. En la década de los 80 hubo una nueva ola de interés por los lenguajes funcionales, añadiendo la tipificación y algunos conceptos modernos de modularización y polimorfismo, como es el caso del lenguaje ML.
Programar en un lenguaje funcional significa construir funciones a partir de las ya existentes. Por lo tanto es importante conocer y comprender bien las funciones que conforman la base del lenguaje, así como las que ya fueron definidas previamente. De esta manera se pueden ir construyendo aplicaciones cada vez más complejas. La desventaja de este modelo es que resulta bastante alejado del modelo de la máquina de von Neumann y, por lo tanto, la eficiencia de ejecución de los intérpretes de lenguajes funcionales no es comparable con la ejecución de los programas imperativos precompilados. Para remediar la deficiencia, se está buscando utilizar arquitecturas paralelas que mejoren el desempeño de los programas funcionales, sin que hasta la fecha estos intentos tengan un impacto real importante
Lenguajes Lógicos
La programación lógica consiste en la aplicación del corpus de conocimiento sobre lógica para el diseño de lenguajes de programación; no debe confundirse con la disciplina de la lógica computacional.
La programación lógica comprende dos paradigmas de programación: la programación declarativa y la programación funcional. La programación declarativa gira en torno al concepto de predicado, o relación entre elementos. La programación funcional se basa en el concepto de función (que no es más que una evolución de los predicados), de corte más matemático
La programación lógica encuentra su hábitat natural en aplicaciones de inteligencia artificial o relacionadas:
- Sistemas expertos, donde un sistema de información imita las recomendaciones de un experto sobre algún dominio de conocimiento.
- Demostración automática de teoremas, donde un programa genera nuevos teoremas sobre una teoría existente.
- Reconocimiento de lenguaje natural, donde un programa es capaz de comprender (con limitaciones) la información contenida en una expresión lingüística humana.
La programación lógica también se utiliza en aplicaciones más «mundanas» pero de manera muy limitada, ya que la programación tradicional es más adecuada a tareas de propósito general
Lenguajes orientados a objetos
La Programación Orientada a Objetos (POO u OOP según sus siglas en inglés) es un paradigma de programación que usa objetos y sus interacciones para diseñar aplicaciones y programas de computadora. Está basado en varias técnicas, incluyendo herencia, modularidad, polimorfismo, y encapsulamiento. Su uso se popularizó a principios de la década de 1990
Los objetos son entidades que combinan estado, comportamiento e identidad:
- El estado está compuesto de datos, serán uno o varios atributos a los que se habrán asignado unos valores concretos (datos).
- El comportamiento está definido por los procedimientos o métodos con que puede operar dicho objeto, es decir, que operaciones se pueden realizar con él.
- La identidad es una propiedad de un objeto que lo diferencia del resto, dicho con otras palabras, es su identificador (concepto análogo al de identificador de una variable o una constante).
La programación orientada a objetos expresa un programa como un conjunto de estos objetos, que colaboran entre ellos para realizar tareas. Esto permite hacer los programas y módulos más fáciles de escribir, mantener y reutilizar
Un nuevo paso en la abstracción de paradigmas de programación es la Programación Orientada a Aspectos (POA). Aunque es todavía una metodología en estado de maduración, cada vez atrae a más investigadores e incluso proyectos comerciales en todo el mundo.
También es necesario recalcar que en la programación orientada a objetos es factible de utilizar en JavaScript
Algunos ejemplos son:
|
|
Programación orientada a objetos
De Wikipedia, la enciclopedia libre
Saltar a navegación, búsqueda
La Programación Orientada a Objetos (POO u OOP según sus siglas en inglés) es un paradigma de programación que usa objetos y sus interacciones para diseñar aplicaciones y programas de computadora. Está basado en varias técnicas, incluyendo herencia, modularidad, polimorfismo, y encapsulamiento. Su uso se popularizó a principios de la década de 1990. Actualmente son muchos los lenguajes de programación que soportan la orientación a objetos.
Introducción Los objetos son entidades que combinan estado, comportamiento e identidad:
El estado está compuesto de datos, serán uno o varios atributos a los que se habrán asignado unos valores concretos (datos).
El comportamiento está definido por los procedimientos o métodos con que puede operar dicho objeto, es decir, qué operaciones se pueden realizar con él.
- La identidad es una propiedad de un objeto que lo diferencia del resto, dicho con otras palabras, es su identificador (concepto análogo al de identificador de una variable o una constante).
La programación orientada a objetos expresa un programa como un conjunto de estos objetos, que colaboran entre ellos para realizar tareas. Esto permite hacer los programas y módulos más fáciles de escribir, mantener y reutilizar.
De esta forma, un objeto contiene toda la información que permite definirlo e identificarlo frente a otros objetos pertenecientes a otras clases e incluso frente a objetos de una misma clase, al poder tener valores bien diferenciados en sus atributos. A su vez, los objetos disponen de mecanismos de interacción llamados métodos que favorecen la comunicación entre ellos. Esta comunicación favorece a su vez el cambio de estado en los propios objetos. Esta característica lleva a tratarlos como unidades indivisibles, en las que no se separan ni deben separarse el estado y el comportamiento.
Los métodos (comportamiento) y atributos (estado) están estrechamente relacionados por la propiedad de conjunto. Esta propiedad destaca que una clase requiere de métodos para poder tratar los atributos con los que cuenta. El programador debe pensar indistintamente en ambos conceptos, sin separar ni darle mayor importancia a ninguno de ellos, hacerlo podría producir el hábito erróneo de crear clases contenedoras de información por un lado y clases con métodos que manejen a las primeras por el otro. De esta manera se estaría realizando una programación estructurada camuflada en un lenguaje de programación orientado a objetos.
Esto difiere de la programación estructurada tradicional, en la que los datos y los procedimientos están separados y sin relación, ya que lo único que se busca es el procesamiento de unos datos de entrada para obtener otros de salida. La programación estructurada anima al programador a pensar sobre todo en términos de procedimientos o funciones, y en segundo lugar en las estructuras de datos que esos procedimientos manejan. En la programación estructurada sólo se escriben funciones que procesan datos. Los programadores que emplean éste nuevo paradigma, en cambio, primero definen objetos para luego enviarles mensajes solicitándoles que realicen sus métodos por sí mismos.
Origen
Los conceptos de la programación orientada a objetos tienen origen en Simula 67, un lenguaje diseñado para hacer simulaciones, creado por Ole-Johan Dahl y Kristen Nygaard del Centro de Cómputo Noruego en Oslo. Al parecer, en este centro, trabajaban en simulaciones de naves, y fueron confundidos por la explosión combinatoria de cómo las diversas cualidades de diversas naves podían afectar unas a las otras. La idea ocurrió para agrupar los diversos tipos de naves en diversas clases de objetos, siendo responsable cada clase de objetos de definir sus propios datos y comportamiento. Fueron refinados más tarde en Smalltalk, que fue desarrollado en Simula en Xerox PARC (y cuya primera versión fue escrita sobre Basic) pero diseñado para ser un sistema completamente dinámico en el cual los objetos se podrían crear y modificar «en marcha» en lugar de tener un sistema basado en programas estáticos.
La programación orientada a objetos tomó posición como el estilo de programación dominante a mediados de los años ochenta, en gran parte debido a la influencia de C++, una extensión del lenguaje de programación C. Su dominación fue consolidada gracias al auge de las Interfaces gráficas de usuario, para las cuales la programación orientada a objetos está particularmente bien adaptada. En este caso, se habla también de programación dirigida por eventos.
Las características de orientación a objetos fueron agregadas a muchos lenguajes existentes durante ese tiempo, incluyendo Ada, BASIC, Lisp, Pascal, entre otros. La adición de estas características a los lenguajes que no fueron diseñados inicialmente para ellas condujo a menudo a problemas de compatibilidad y a la capacidad de mantenimiento del código. Los lenguajes orientados a objetos «puros», por otra parte, carecían de las características de las cuales muchos programadores habían venido a depender. Para saltar este obstáculo, se hicieron muchas tentativas para crear nuevos lenguajes basados en métodos orientados a objetos, pero permitiendo algunas características imperativas de maneras «seguras». El Eiffel de Bertrand Meyer fue un temprano y moderadamente acertado lenguaje con esos objetivos pero ahora ha sido esencialmente reemplazado por Java, en gran parte debido a la aparición de Internet, y a la implementación de la máquina virtual de Java en la mayoría de navegadores. PHP en su versión 5 se ha ido modificando y soporta una orientación completa a objetos, cumpliendo todas las características propias de la orientación a objetos.
Conceptos fundamentales [editar]
La programación orientada a objetos es una nueva forma de programar que trata de encontrar una solución a estos problemas. Introduce nuevos conceptos, que superan y amplían conceptos antiguos ya conocidos. Entre ellos destacan los siguientes:
- Clase: definiciones de las propiedades y comportamiento de un tipo de objeto concreto. La instanciación es la lectura de estas definiciones y la creación de un objeto a partir de ellas, (de c a d),Es la facilidad mediante la cual la clase D ha definido en ella cada uno de los atributos y operaciones de C, como si esos atributos y operaciones hubiesen sido definidos por la misma D.
- Objeto: entidad provista de un conjunto de propiedades o atributos (datos) y de comportamiento o funcionalidad (métodos). Se corresponde con los objetos reales del mundo que nos rodea, o a objetos internos del sistema (del programa). Es una instancia a una clase.
- Método: algoritmo asociado a un objeto (o a una clase de objetos), cuya ejecución se desencadena tras la recepción de un «mensaje». Desde el punto de vista del comportamiento, es lo que el objeto puede hacer. Un método puede producir un cambio en las propiedades del objeto, o la generación de un «evento» con un nuevo mensaje para otro objeto del sistema.
- Evento: un suceso en el sistema (tal como una interacción del usuario con la máquina, o un mensaje enviado por un objeto). El sistema maneja el evento enviando el mensaje adecuado al objeto pertinente. También se puede definir como evento, a la reacción que puede desencadenar un objeto, es decir la acción que genera.
- Mensaje: una comunicación dirigida a un objeto, que le ordena que ejecute uno de sus métodos con ciertos parámetros asociados al evento que lo generó.
- Propiedad o atributo: contenedor de un tipo de datos asociados a un objeto (o a una clase de objetos), que hace los datos visibles desde fuera del objeto y esto se define como sus características predeterminadas, y cuyo valor puede ser alterado por la ejecución de algún método.
- Estado interno: es una variable que se declara privada, que puede ser únicamente accedida y alterada por un método del objeto, y que se utiliza para indicar distintas situaciones posibles para el objeto (o clase de objetos). No es visible al programador que maneja una instancia de la clase.
- Componentes de un objeto:atributos, identidad, relaciones y métodos.
- Representación de un objeto: un objeto se representa por medio de una tabla o entidad que esté compuesta por sus atributos y funciones correspondientes.
En comparación con un lenguaje imperativo, una «variable», no es más que un contenedor interno del atributo del objeto o de un estado interno, así como la «función» es un procedimiento interno del método del objeto.
Características de la POO [editar]
Hay un cierto desacuerdo sobre exactamente qué características de un método de programación o lenguaje le definen como «orientado a objetos», pero hay un consenso general en que las características siguientes son las más importantes (para más información, seguir los enlaces respectivos):
- Abstracción: Cada objeto en el sistema sirve como modelo de un «agente» abstracto que puede realizar trabajo, informar y cambiar su estado, y «comunicarse» con otros objetos en el sistema sin revelar cómo se implementan estas características. Los procesos, las funciones o los métodos pueden también ser abstraídos y cuando lo están, una variedad de técnicas son requeridas para ampliar una abstracción.
- Encapsulamiento: Significa reunir a todos los elementos que pueden considerarse pertenecientes a una misma entidad, al mismo nivel de abstracción. Esto permite aumentar la cohesión de los componentes del sistema. Algunos autores confunden este concepto con el principio de ocultación, principalmente porque se suelen emplear conjuntamente.
- Principio de ocultación: Cada objeto está aislado del exterior, es un módulo natural, y cada tipo de objeto expone una interfaz a otros objetos que especifica cómo pueden interactuar con los objetos de la clase. El aislamiento protege a las propiedades de un objeto contra su modificación por quien no tenga derecho a acceder a ellas, solamente los propios métodos internos del objeto pueden acceder a su estado. Esto asegura que otros objetos no pueden cambiar el estado interno de un objeto de maneras inesperadas, eliminando efectos secundarios e interacciones inesperadas. Algunos lenguajes relajan esto, permitiendo un acceso directo a los datos internos del objeto de una manera controlada y limitando el grado de abstracción. La aplicación entera se reduce a un agregado o rompecabezas de objetos.
- Polimorfismo: comportamientos diferentes, asociados a objetos distintos, pueden compartir el mismo nombre, al llamarlos por ese nombre se utilizará el comportamiento correspondiente al objeto que se esté usando. O dicho de otro modo, las referencias y las colecciones de objetos pueden contener objetos de diferentes tipos, y la invocación de un comportamiento en una referencia producirá el comportamiento correcto para el tipo real del objeto referenciado. Cuando esto ocurre en «tiempo de ejecución», esta última característica se llama asignación tardía o asignación dinámica. Algunos lenguajes proporcionan medios más estáticos (en «tiempo de compilación») de polimorfismo, tales como las plantillas y la sobrecarga de operadores de C++.
- Herencia: las clases no están aisladas, sino que se relacionan entre sí, formando una jerarquía de clasificación. Los objetos heredan las propiedades y el comportamiento de todas las clases a las que pertenecen. La herencia organiza y facilita el polimorfismo y el encapsulamiento permitiendo a los objetos ser definidos y creados como tipos especializados de objetos preexistentes. Estos pueden compartir (y extender) su comportamiento sin tener que reimplementar su comportamiento. Esto suele hacerse habitualmente agrupando los objetos en clases y estas en árboles o enrejados que reflejan un comportamiento común. Cuando un objeto hereda de más de una clase se dice que hay herencia múltiple.
Lenguajes orientados a objetos
Entre los lenguajes orientados a objetos se destacan los siguientes:
- ActionScript
- ActionScript 3
- Ada
- C++
- C#
- Clarion
- Lenguaje de programación D
- Object Pascal (Delphi)
- Harbour
- Eiffel
- Java
- JavaScript (la herencia se realiza por medio de la programación basada en prototipos)
- Lexico (en castellano)
- Objective-C
- Ocaml
- Oz
- Lenguaje de programación R
- Perl (soporta herencia múltiple. La resolución se realiza en preorden, pero puede modificarse al algoritmo C3 por medio del módulo Class::C3 en CPAN)
- PHP (en su versión 5)
- Python
- Ruby
- Smalltalk
- Magik (SmallWorld)
- NET
- Visual FoxPro
- XBase++
- Gambas
- Flex builder (adobe)
Muchos de estos lenguajes de programación no son puramente orientados a objetos, sino que son híbridos que combinan la POO con otros paradigmas.
Al igual que C++ otros lenguajes, como OOCOBOL, OOLISP, OOPROLOG y Object REXX, han sido creados añadiendo extensiones orientadas a objetos a un lenguaje de programación clásico.
Un nuevo paso en la abstracción de paradigmas de programación es la Programación Orientada a Aspectos (POA). Aunque es todavía una metodología en estado de maduración, cada vez atrae a más investigadores e incluso proyectos comerciales en todo el mundo.
[…] ← Anterior […]